VĂœstuĆŸ ploĆĄnĂœch ĆŸelezobetĂłnovĂœch prvkov viazanĂĄ robotmi
Zo vĆĄetkĂœch odvetvĂ priemyslu je prĂĄve ten stavebnĂœ najmenej automatizovanĂœ. ZauĆŸĂvanĂ© spĂŽsoby nĂĄvrhu stavebnĂœch konĆĄtrukciĂ sĂș prispĂŽsobenĂ© tomuto faktu, Äo platĂ aj o samotnom nĂĄvrhu betonĂĄrskej vĂœstuĆŸe. VĂœstuĆŸ ploĆĄnĂœch prvkov, ako sĂș stropnĂ© dosky alebo steny, je pritom dostatoÄne jednoduchĂĄ na to, aby jej vĂœroba bola automatizovanĂĄ, ÄĂm je znĂĆŸenĂĄ spotreba materiĂĄlu a aj zvĂœĆĄenĂĄ efektivita vyuĆŸitia pracovnej sily. ÄlĂĄnok pojednĂĄva princĂp nĂĄvrhu vĂœstuĆŸe viazanej robotom Perseus firmy XEUS – Civil Engineering Robotics s. r. o. vysvetlenom na vĂœstuĆŸi pri spodnom povrchu stropnej dosky obytnej budovy. Pri tvorbe metodiky nĂĄvrhu takejto vĂœstuĆŸe sa klĂĄdol dĂŽraz na okamĆŸitĂș moĆŸnosĆ„ nasadenia do praxe, priÄom si nĂĄjde uplatnenie ako v zĂĄvodoch na vĂœrobu prefabrikĂĄtov, tak aj priamo na stavbe.
1. Ăvod
S produkciou aĆŸ 38 % celosvetovĂœch uhlĂkovĂœch emisiĂ [1] patrĂ stavebnĂœ priemysel medzi hlavnĂœ objekt zĂĄujmu v rĂĄmci boja proti klimatickej zmene. V kontexte strategickej vĂzie EurĂłpskej komisie pre dosiahnutie klimaticky neutrĂĄlneho hospodĂĄrstva do roku 2050, MedzinĂĄrodnĂĄ agentĂșra pre energetiku (International Energy Agency, IEA) odhaduje, ĆŸe emisie priamo vyplĂœvajĂșce zo stavebnej Äinnosti musia klesnĂșĆ„ o 50 % do roku 2030. PodÄŸa Nigela Toppinga, vysokĂ©ho predstaviteÄŸa pre zachovanie klĂmy na COP26, „MusĂme prehodnotiĆ„ vyuĆŸitie betĂłnu a ocele. To, Äi sa uhlĂkovo neutrĂĄlna oceÄŸ a betĂłn stanĂș materiĂĄlmi budĂșcnosti, bude zĂĄvisieĆ„ od skutoÄnosti, ako rĂœchlo sa tieto odvetvia inovujĂș tvĂĄrou v tvĂĄr novĂœm a prevratnĂœm technolĂłgiĂĄm.“
V rozpore so zĂĄmerom EurĂłpskej komisie, aktuĂĄlna ekonomickĂĄ situĂĄcia v EurĂłpe a takisto aj na ĂșzemĂ Slovenskej republiky, vedie k zhorĆĄeniu efektivity vyuĆŸĂvania materiĂĄlov. Nedostatok kvalifikovanĂœch robotnĂkov (viazaÄov betonĂĄrskej vĂœstuĆŸe) ako aj vysokĂ© nĂĄroky na rĂœchlosĆ„ vĂœstavby zaprĂÄinili, ĆŸe sa realizĂĄtori ÄastokrĂĄt priklĂĄĆajĂș k menej efektĂvnym nĂĄvrhom vystuĆŸovania ĆŸelezobetĂłnovĂœch konĆĄtrukciĂ podÄŸa tradiÄnĂœch postupov, s vysokou spotrebou materiĂĄlov a so znaÄnĂœmi prepravnĂœmi vzdialenosĆ„ami.
VzhÄŸadom na fakt, ĆŸe automatizĂĄcia ako takĂĄ v tomto sektore stavebnĂ©ho priemyslu prakticky neexistuje, je nutnĂ© si stanoviĆ„ rozumnĂ© a hlavne splniteÄŸnĂ© ciele. Bolo teda prirodzenĂ©, ĆŸe pre tento ĂșÄel boli vybranĂ© takĂ© konĆĄtrukÄnĂ© prvky, ktorĂ© sĂș, Äo sa vystuĆŸenia tĂœka, jednoduchĂ©. ZĂĄroveĆ vĆĄak ich vystuĆŸenie tvorĂ najvĂ€ÄĆĄiu ÄasĆ„ z celkovej vĂœstuĆŸe pouĆŸitej v typickĂœch monolitickĂœch konĆĄtrukciĂĄch pozemnĂœch stavieb. Ide o 2D konĆĄtrukÄnĂ© prvky. KonkrĂ©tne o vĂœstuĆŸ, ktorĂĄ mĂŽĆŸe byĆ„ vyhotovenĂĄ vo forme sietĂ. Nejde vĆĄak o beĆŸnĂ©, typizovanĂ© zvĂĄranĂ© siete, ale o optimalizovanĂ© unikĂĄtne siete.
2. Porovnanie zauĆŸĂvanĂœch spĂŽsobov vystuĆŸovania
PrĂpadovĂĄ ĆĄtĂșdia bola vykonanĂĄ na jednom z veÄŸkĂœch developerskĂœch projektov na okraji Bratislavy. KonĆĄtrukÄnĂœ systĂ©m objektov tejto etapy developerskĂ©ho projektu,bol navrhnutĂœ ako stenovĂœ, obojsmernĂœ. SamotnĂ© zvislĂ©, ako aj vodorovnĂ© nosnĂ© konĆĄtrukcie boli vyhotovenĂ© z monolitickĂ©ho ĆŸelezobetĂłnu. VybranĂœ objekt bol zvolenĂœ ako prĂpadovĂĄ ĆĄtĂșdia kvĂŽli tomu, ĆŸe realizaÄnĂœ projekt bol vypracovanĂœ s vĂœstuĆŸou vo viazanej forme. Po vysĂșĆ„aĆŸenĂ realizĂĄcie si realizĂĄtor na vlastnĂ© nĂĄklady dal prepracovaĆ„ vĂœstuĆŸ z viazanej formy na vĂœstuĆŸ zvĂĄranĂœmi sieĆ„ami s prĂloĆŸkami.
V prvej alternatĂve vystuĆŸenia pomocou viazanej vĂœstuĆŸe bolo na jednom typickom podlaĆŸĂ navrhnutĂœch 6544 kg vĂœstuĆŸe v stropnej doske objeku a 5554 kg vĂœstuĆŸe v stenĂĄch. Spolu 12 098 kg vĂœstuĆŸe.
V druhej alternatĂve vystuĆŸenie pomocou zvĂĄranĂœch betonĂĄrskych sietĂ s prĂloĆŸkami bolo na jednom typickom podlaĆŸĂ pouĆŸitĂœch 7807 kg vĂœstuĆŸe v stropnej doske a 6202 kg vĂœstuĆŸe v stenĂĄch. Spolu 14 009 kg vĂœstuĆŸe.
Na typickom podlaĆŸĂ sa zvĂœĆĄila spotreba ocele o takmer 16 % (spracovanĂ© na zĂĄklade [2]).
3. VĂœstuĆŸ viazanĂĄ robotmi
Aby si vĂœstuĆŸ viazanĂĄ robotmi naĆĄla uplatnenie v tak rigidnom priemyselnom odvetvĂ, ako je ten stavebnĂœ, je nutnĂ© aby kombinovala vĂœhody viazanej vĂœstuĆŸe s vĂœhodami vystuĆŸovania pomocou sietĂ. ZĂĄklad tejto vĂœstuĆŸe tvoria veÄŸkoformĂĄtovĂ© siete.
3.1 Koncept veÄŸkoformĂĄtovĂœch sietĂ
VeÄŸkoformĂĄtovĂ© siete sĂș najjednoduchĆĄĂm a zĂĄroveĆ najefektĂvnejĆĄĂm spĂŽsobom navrhovania vĂœstuĆŸe ploĆĄnĂœch ĆŸelezobetĂłnovĂœch prvkov viazanĂœch pomocou robotov. Presunom vĂœroby sietĂ priamo na stavenisko je moĆŸnĂ© zvĂ€ÄĆĄiĆ„ ich rozmer, ktorĂœ uĆŸ nebude obmedzovanĂœ ich prepravou, Äo zĂĄroveĆ zmierni dopad na ĆŸivotnĂ© prostredie.
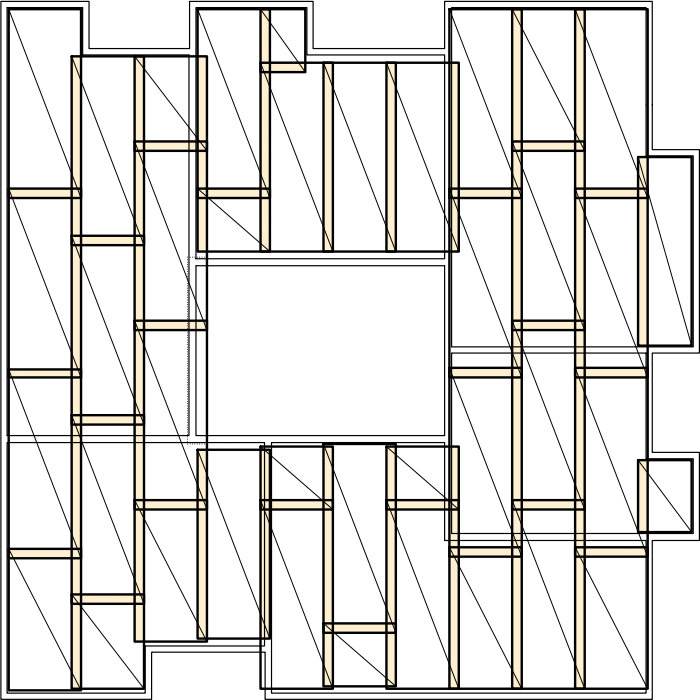
Obr. 1 ZvĂĄranĂ© siete Q257 (6×2,3 m) pouĆŸitĂ© v projekte (vÄŸavo) a veÄŸkoformĂĄtovĂ© siete 6×6 m (vpravo). Ć rafa reprezentuje prekryv.
Ako cieÄŸ bol stanovenĂœ rozmer sietĂ 6×6 metrov. SamotnĂ© siete sĂș vyrĂĄbanĂ© z kotĂșÄov betonĂĄrskej vĂœstuĆŸe. VĂœstuĆŸ v kotĂșÄi prechĂĄdza cez tzv. vyrovnĂĄvaÄku betonĂĄrskej vĂœstuĆŸe, ktorĂĄ prĂșt odstrihne v presnej vzdialenosti a posunie do zĂĄsobnĂka. KeÄĆŸe prĂșty vĂœstuĆŸe mĂŽĆŸu byĆ„ variabilnej dÄșĆŸky, je tak moĆŸnĂ© vyhotoviĆ„ siete atypickĂœch rozmerov a tvarov, Äi sietĂ s otvormi. Pri takto vyrobenĂœch sieĆ„ach je prakticky eliminovanĂœ odpad, ktorĂœ vyplĂœva z nutnosti rezania vopred zvĂĄranĂœch sietĂ.
KontrolnĂœ nĂĄvrh a prepoÄet bol vyhotovenĂœ ako alternatĂva k vystuĆŸeniu spomĂnanĂ©ho objektu v kapitole 2. Na typickom podlaĆŸĂ bol porovnĂĄvanĂœ hlavnĂœ raster vĂœstuĆŸe vyhotovenĂœ v podobe zvĂĄranĂœch sietĂ. Na obrĂĄzku 1 vÄŸavo, je vyĆĄrafovanĂĄ pĂŽdorysnĂĄ plocha prekryvu pouĆŸitĂœch zvĂĄranĂœch sietĂ. Ide o 469.2 m2 zvĂĄranĂœch sietĂ typu, pri ktorom prekryv sietĂ bol 59.2 m2 (12.6 %) z celkovej plochy. Äervenou farbou je znĂĄzornenĂĄ tĂĄ ÄasĆ„ sietĂ, ktorĂĄ musela byĆ„ odstrihnutĂĄ a tvorila tak odpad. OdstrihnutĂĄ ÄasĆ„ (z veÄŸkej Äasti de facto odpad sietĂ) bol 27.2 m2 (5.8 %) z celkovej plochy sietĂ.
Pri pouĆŸitĂ veÄŸkoformĂĄtovĂœch atypickĂœch sietĂ sa redukuje prekryv sietĂ (na Obr. 1 vpravo – vyĆĄrafovanĂĄ plocha) na 34.1 m2 Äo tvorĂ 8.3 % z celkovej plochy 412.6 m2. Takisto sa Ășplne eliminimuje odpad. Oproti konvenÄnĂœm sieĆ„am dochĂĄdza v tomto prĂpade k Ășspore 12.1 % materiĂĄlu.
3.2 NĂĄvrh veÄŸkoformĂĄtovĂœch optimalizovanĂœch sietĂ
Viazanie vĂœstuĆŸe v podobe veÄŸkoformĂĄtovĂœch sietĂ pomocou robotov umoĆŸĆuje navrhovaĆ„ jednotlivĂ© prĂșty vĂœstuĆŸe ploĆĄnĂœch prvkov tak, aby sa nachĂĄdzali vĂœluÄne v tĂœch miestach, v takej vzdialenosti a v takej dÄșĆŸke ako je staticky nutnĂ©. KeÄĆŸe sa pri pouĆŸitĂ konvenÄnĂœch metĂłd vystuĆŸovania dbĂĄ na dostatoÄnĂș jednoduchosĆ„ vyhotovenia, v praxi to znamenĂĄ, ĆŸe projekty, kde je vo vĂœkresoch vĂœstuĆŸe prĂliĆĄ veÄŸa poloĆŸiek, sĂș neĆŸiadĂșce pre ich zdÄșhavĂ© vyhotovenie. HÄŸadĂĄ sa teda kompromis medzi spotrebou vĂœstuĆŸe a rĂœchlosti vyhotovenia. Pri viazanĂ vĂœstuĆŸe pomocou robotov sa na ÄŸudskĂœ faktor pri jej viazanĂ neberie ohÄŸad. Na obrĂĄzku 2, je vyzobrazenĂ© chronologickĂ© usporiadanie veÄŸkoformĂĄtovĂœch optimalizovanĂœch sietĂ – VOS. Je moĆŸnĂ© vidieĆ„, ĆŸe jednotlivĂ© prĂșty dodatoÄnej vĂœstuĆŸe sĂș navrhovanĂ© len v miestach najviac exponovanĂœch Ć„ahovĂœm napĂ€tiam, ktorĂ© sĂș reprezentovanĂ© izolĂniami. Je nutnĂ© vĆĄak dodrĆŸaĆ„ urÄitĂœ postup a pravidlĂĄ pri jej nĂĄvrhu, aby bola zabezpeÄenĂĄ bezproblĂ©movĂĄ inĆĄtalĂĄcia sietĂ na stavbe.
4. NĂĄvrh vĂœstuĆŸe
Pre nĂĄvrh samotnej vĂœstuĆŸe staÄia doteraz pouĆŸĂvanĂ© metĂłdy jej vĂœpoÄtu. SamotnĂș vĂœstuĆŸ aj v tomto prĂpade mĂŽĆŸeme rozdeliĆ„ na zĂĄkladnĂœ raster a prĂloĆŸky. BliĆŸĆĄie sa danej problematike autor1 venuje vo svojej dizertaÄnej prĂĄci.
4.1 ZĂĄkladnĂœ raster
PrvĂœm krokom je teda rieĆĄenĂș vystuĆŸovanĂș oblasĆ„ prekryĆ„ rastrom s veÄŸkosĆ„ou oka navrhnutej vzdialenosti jednotlivĂœch prĂștov. ObyÄajne ide o vĂœstuĆŸ potrebnĂș na pokrytie poĆŸiadavky takzvanej minimĂĄlnej plochy vĂœstuĆŸe As,min [3]. Je dĂŽleĆŸitĂ© si uvedomiĆ„, ĆŸe jednotlivĂ© prĂșty vĂœstuĆŸe ukladĂĄ a viaĆŸe robot. Je moĆŸnĂ© tĂœm pĂĄdom navrhovaĆ„ vzdialenosti vĂœstuĆŸe zaokrĂșhlenĂ© na centimetre.
4.2 PrĂloĆŸky
Pre nĂĄvrh prĂloĆŸiek sĂș pouĆŸitĂ© izolĂnie vymedzujĂșce tzv. vĂœstuĆŸnĂ© oblasti. PrvĂĄ vĂœstuĆŸnĂĄ oblasĆ„ je takĂĄ oblasĆ„ v ktorej musĂ byĆ„ plocha vĂœstuĆŸe tvoriaca zĂĄkladnĂœ raster navĂœĆĄenĂĄ o jeden prĂșt na meter beĆŸnĂœ. NasledujĂș ÄalĆĄie vĂœstuĆŸnĂ© oblasti aĆŸ kĂœm nie je pokrytĂĄ najvyĆĄĆĄia potrebnĂĄ plocha vĂœstuĆŸe. V ÄŸubovoÄŸnom komerÄne dostupnom statickom programe je teda nutnĂ© exportovaĆ„ izolĂnie reprezentujĂșce vĂœstuĆŸnĂ© oblasti. Hodnota pre i-tu izolĂniu, kde nultĂĄ izolĂnia reprezentuje plochu pokrytĂș zĂĄkladnĂœm rastrom, sa vypoÄĂta na zĂĄklade vzĆ„ahu
kde je
- As,Ii
- plocha vĂœstuĆŸe, ktorĂș je nutnĂ© dodaĆ„ do vĂœstuĆŸnej oblasti,
- sprov
- rozostup vĂœstuĆŸĂ v zĂĄkladnom rastri,
- As,φ
- plocha vĂœstuĆŸe v zĂĄkladnom rastri.
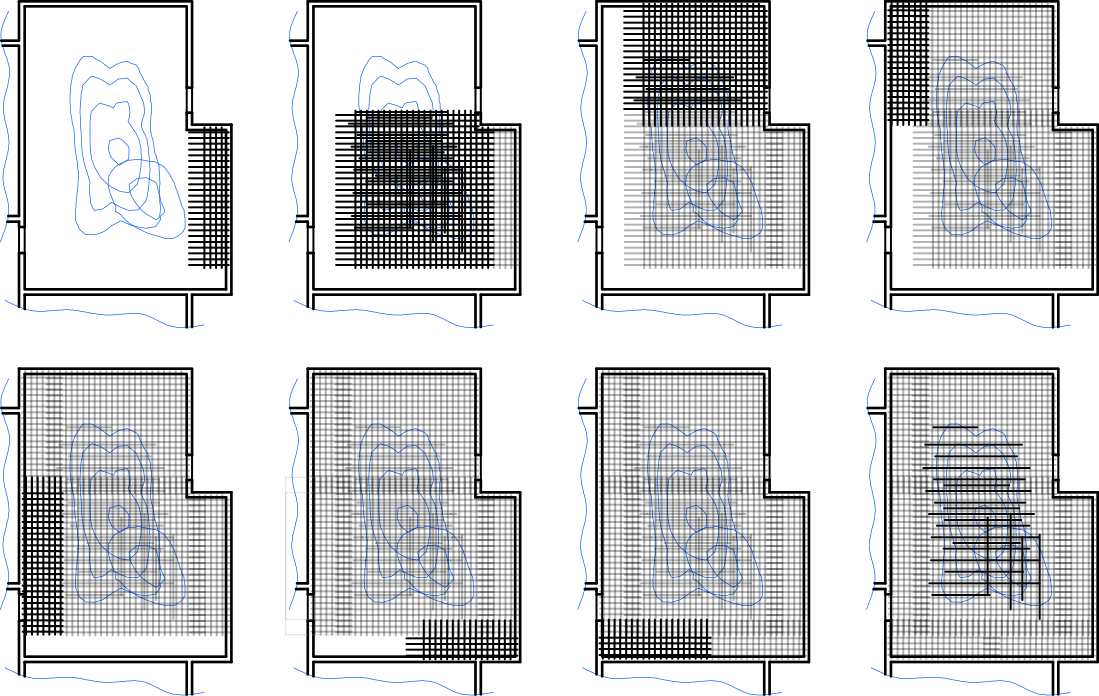
KeÄĆŸe komerÄne dostupnĂ© statickĂ© programy neumoĆŸĆujĂș zobrazenie viacerĂœch izolĂnii ĆĄpecifickej hodnoty naraz, je nutnĂ© tieto izolĂnie poskladaĆ„ dodatoÄne tak ako je znĂĄzornenĂ© na obrĂĄzku 3. V tĂœchto vĂœstuĆŸnĂœch oblastiach je nutnĂ© dodaĆ„ prĂloĆŸky, ktorĂœch dÄșĆŸku je moĆŸnĂ© ukonÄiĆ„ vo vzdialenosti kotevnej dÄșĆŸky za hranicou danej oblasti. PoslednĂœm krokom je rozdelenie vĂœstuĆŸe na siete rozmerov 6×6 m. VznikajĂș tak unikĂĄtne optimalizovanĂ© veÄŸkoformĂĄtovĂ© siete, vyrĂĄbanĂ© priamo na stavbe, ktorĂ© sa pomocou ĆŸeriavu ukladajĂș priamo do debnenia.
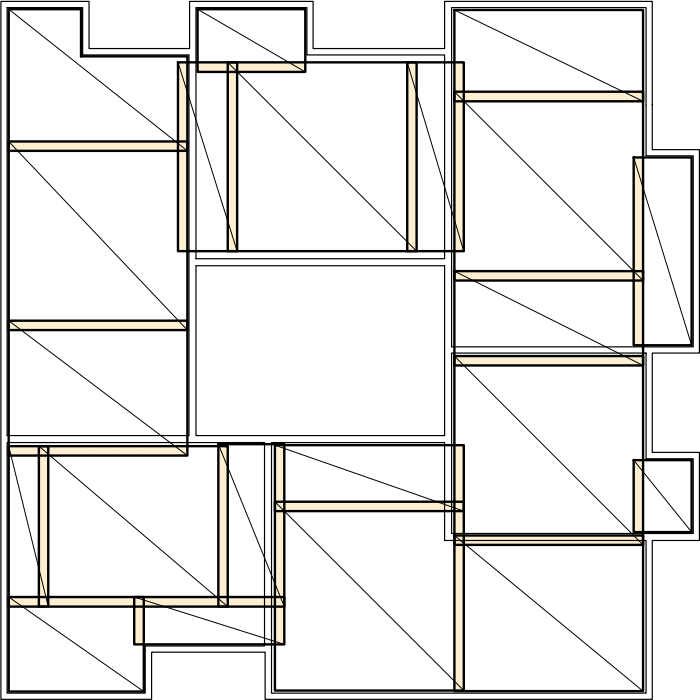
Obr. 2 ChronologickĂ© usporiadanie optimalizovanĂœch na mieru vyrobenĂœch sietĂ v debnenĂ stropnej dosky
4.3 PodrobnĂœ nĂĄvrh
Podrobne sa nĂĄvrhu takejto vĂœstuĆŸe venuje autor J. Rubint vo svojej dizertaÄnej prĂĄci s nĂĄzvom OptimalizovanĂœ nĂĄvrh roboticky viazanej betonĂĄrskej vĂœstuĆŸe [4]. V prĂĄci je taktieĆŸ uvedenĂœ pseudokĂłd spoloÄne so zdrojovĂœm kĂłdom programu, ktorĂœ pomocou numerickĂœch metĂłd automaticky vytvĂĄra izolĂnie vĂœstuĆŸnĂœch oblastĂ.
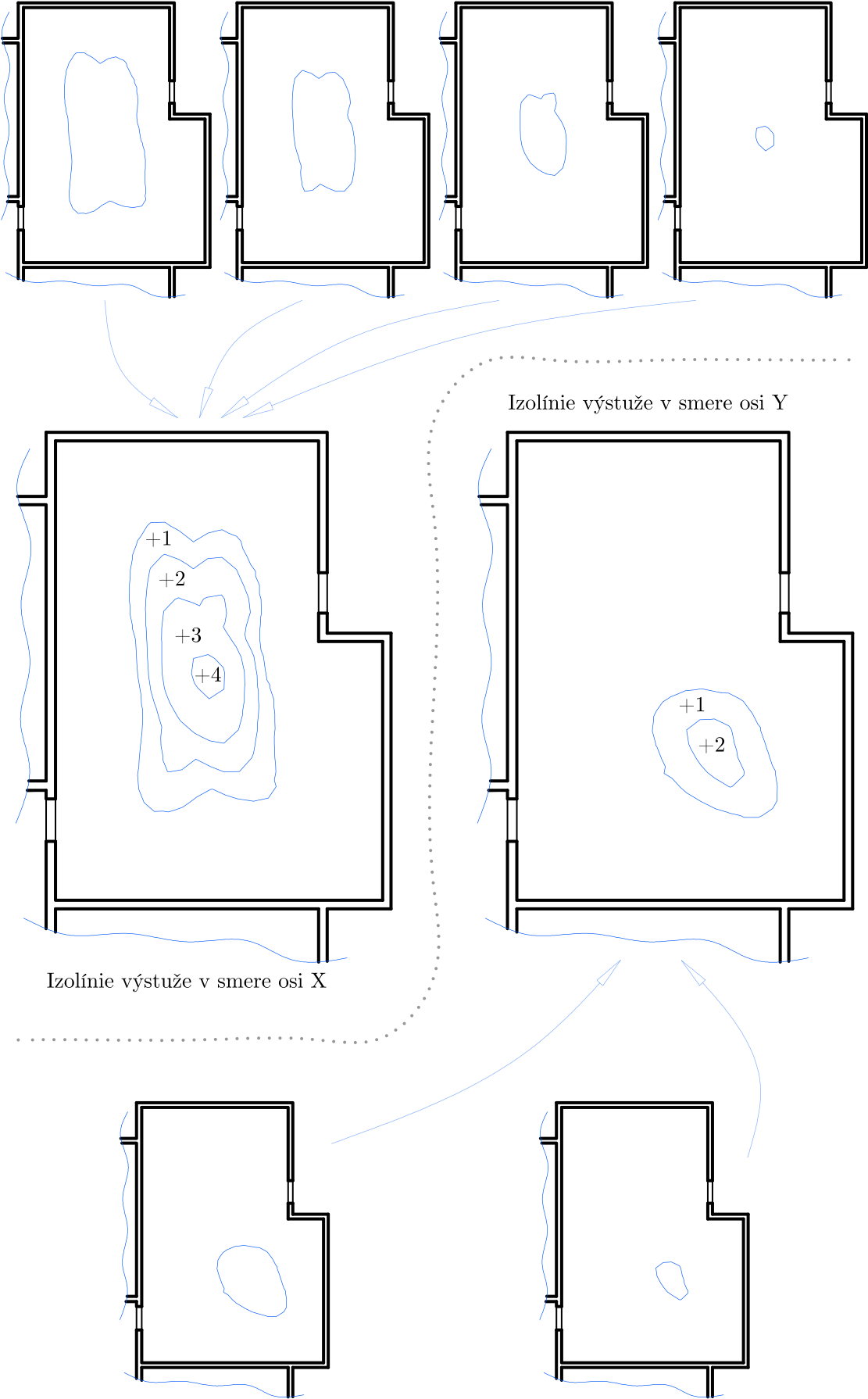
Obr. 3 IzolĂnie pre nĂĄvrh prĂloĆŸiek pre spodnĂœ povrch stropnej dosky
5. NĂĄvrh robota
VĂœstupom stroja (Obr. 4) je vĂœstuĆŸnĂĄ sieĆ„, ktorĂĄ mĂŽĆŸe maĆ„ ÄŸubovoÄŸnĂœ tvar vyskladateÄŸnĂœ z jednotlivĂœch rovnĂœch prĂștov – to znamenĂĄ ĆĄtvorce, obdÄșĆŸniky, tvary pĂsmen „L“, „T“ a inĂ©. Pre tento ĂșÄel bola zostrojenĂĄ rĂĄmovĂĄ konĆĄtrukcia vo vĂœĆĄke pribliĆŸne 1 m s troma nezĂĄvislĂœmi vedeniami. V osi „X“ je ukladaÄ, ktorĂœ vezme odstrihnutĂœ prĂșt z vyrovnĂĄvaÄky a uloĆŸĂ ho do riadkov. NĂĄsledne sa odparkuje mimoĂșrovĆovo, ÄĂm dĂĄ moĆŸnosĆ„ pohybu ÄalĆĄĂm dvom nezĂĄvislĂœm osiam – „Y1“ a „Y2“. Jedna z tĂœchto osĂ, podobne ako os „X“, ukladĂĄ nastrihanĂ© prĂșty kolmo na prvĂș vrstvu, zatiaÄŸ Äo druhĂĄ os sa starĂĄ o viazanie naukladanej vĂœstuĆŸe.
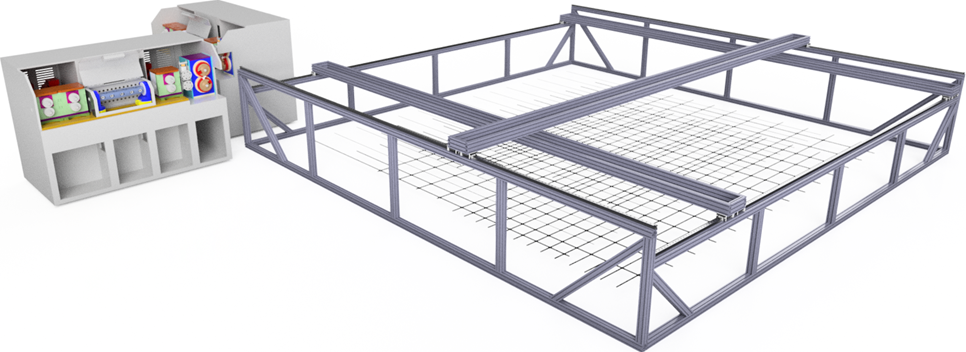
Obr. 4 Gantry portĂĄl Perseus firmy XEUS – Civil Engineering Robotics
KonĆĄtrukcia stroja tak predstavuje gantry portĂĄl s vĂœĆĄkou 500/800 mm (jednotlivĂ© osi). ZĂĄkladnĂœm stavebnĂœm prvkom je hlinĂkovĂœ profil, ktorĂœ poskytuje okrem nĂzkej vĂĄhy aj vysokĂș univerzĂĄlnosĆ„, ktorĂĄ napomĂĄha k ÄŸahkej montĂĄĆŸi/demontĂĄĆŸi zariadenia a prinĂĄĆĄa so sebou moĆŸnosĆ„ prototyp jednoducho a priamoÄiaro modifikovaĆ„ v prĂpade potreby.
6. ZĂĄver
PouĆŸitĂm optimalizovanĂœch veÄŸkoformĂĄtovĂœch sietĂ doĆĄlo v prĂpadovej ĆĄtĂșdii k ĆĄetreniu ocele oproti prvej alternatĂve (viazanĂĄ vĂœstuĆŸ) aĆŸ o 10 %. VĂœhodami rieĆĄenia sĂș minimĂĄlna zmena metodiky nĂĄvrhu vĂœstuĆŸe do ĆŸelezobetĂłnovĂœch ploĆĄnĂœch konĆĄtrukÄnĂœch prvkov, zvĂœĆĄenie objemov odbornej prĂĄce ako aj zrĂœchlenie vĂœstavby. AutomatizĂĄcia spĂĄja vĂœhody nĂzkej spotreby materiĂĄlu (viazanĂĄ forma vĂœstuĆŸe) s rĂœchlosĆ„ou a jednoduchosĆ„ou jej vyhotovenia (vĂœstuĆŸnĂ© siete). NevĂœhodou je nutnosĆ„ vymedzenia pracovnĂ©ho priestoru stroja na stavbe / v zĂĄvode prefa.
Obr. 5 ZakladajĂșci spoloÄnĂci spoloÄnosti XEUS – CER s prototypom robota Perseus: doc. Ing. Peter PaulĂk, PhD.; Ing. Stanislav Rubint; Ing. Jakub Rubint, PhD.; Ing. Matej BatoĆĄoviÄ
LiteratĂșra
- UN Environment programme Building sector emissions hit record high, but low-carbon pandemic recovery can help transform sector. UN report 2020.
- BaÄŸĂĄk Äœ. ProjektovĂĄ dokumentĂĄcia, VĂœkresy vĂœstuĆŸe developerskĂ©ho projektu – Bory. Bratislava 2020.
- Benko V., BilÄĂk J., Fillo Äœ., Halvonik J. BetĂłnovĂ© konĆĄtrukcie. STU Bratislava 2008.
- https://opac.crzp.sk/?fn=detailBiblioFormChildKPODJ&sid=85CE14C1EED0152B7D39DB9735B2&seo=CRZP-detail-kniha
PĆĂspÄvek se vÄnuje automatizaci procesu armovĂĄnĂ jak z hlediska velikosti armovacĂch sĂtĂ, tak z pohledu Ășspory lidskĂ© prĂĄce. Vzhledem k momentĂĄlnĂmu dÄnĂ na poli cen materiĂĄlu a lidskĂ© prĂĄce je vĂœvoj v danĂ© problematice velmi aktuĂĄlnĂ. AutoĆi ve svĂ© prĂĄci upozorĆujĂ na spotĆebu nevyuĆŸitĂ©ho materiĂĄlu pĆi potĆebnĂœch pĆekryvech jednotlivĂœch sĂtĂ a odĆezkĆŻ, kterĂĄ vznikĂĄ poklĂĄdkou typizovanĂœch sĂtĂ danĂœch rozmÄrĆŻ. Z hlediska procesu vĂœstavby je vyuĆŸitĂ sĂtĂ jednĂm ze zĂĄsadnĂch faktorĆŻ ovlivĆujĂcĂ rychlost vĂœstavby, a to v porovnĂĄnĂ s bÄĆŸnĂœm armovĂĄnĂm na stavbÄ z prutĆŻ, kterĂ© mĂĄ svĂ© opodstatnÄnĂ v pĆĂpadÄ lokĂĄlnĂch namĂĄhĂĄnĂ a nutnĂ©ho nĂĄvrhu pĆĂloĆŸek. AutoĆi vĂœvojem robotickĂ©ho systĂ©mu sledujĂ tĆi smÄry Ășspor, a to optimalizaci velikosti sĂtĂ, Ășsporu lidskĂ© energie robotickou vĂœrobou sĂtĂ a armovĂĄnĂ sĂtÄ na mĂru dle statickĂ©ho nĂĄvrhu/pĆidĂĄnĂ pĆĂloĆŸek. V celkovĂ©m mÄĆĂtku se tak jednĂĄ o velmi rozumnĂœ proces optimalizace nĂĄkladĆŻ na vĂœstavbu, kterĂœ autoĆi vyÄĂslili pĆi studii aĆŸ na 10 % bez zapoÄĂtĂĄnĂ Ășspor lidskĂœch zdrojĆŻ plynoucĂch z armovĂĄnĂ robotem. DrobnĂ© negativum navrĆŸenĂ© technologie shledĂĄvĂĄm v transportu a uklĂĄdĂĄnĂ sĂtĂ o rozmÄrech aĆŸ 6×6 metrĆŻ. PĆedpoklĂĄdĂĄm, ĆŸe tento problĂ©m by mohl bĂœt ĆeĆĄen napĆĂklad umĂstÄnĂm robotickĂ©ho systĂ©mu pĆĂmo na staveniĆĄti. UklĂĄdĂĄnĂ sĂtĂ pak pĆĂpadnĂœm pĆizpĆŻsobenĂm projektu. AutoĆi toto zmiĆujĂ i ve svĂœch zĂĄvÄrech. Je nutnĂ© si uvÄdomit, ĆŸe vyvĂjenĂĄ technologie mĆŻĆŸe bĂœt v budoucnu nĂĄpomocnĂĄ z hlediska Ășspor, je vĆĄak nutnĂ© na to pĆipravit stavebnĂ firmy a jejich pracovnĂky. Technologie v sobÄ zahrnuje nutnost vyuĆŸitĂ danĂ© sĂtÄ v danĂ©m mĂstÄ (pĆesnĂœ kladeÄskĂœ plĂĄn), coĆŸ oproti bÄĆŸnĂ©mu systĂ©mu armovĂĄnĂ pomocĂ typizovanĂœch, stejnĂœch sĂtĂ s pĆesahy klade nĂĄroky na preciznost. CelkovÄ se jednĂĄ o velmi zajĂmavĂœ vĂœzkum s dobrou perspektivou pro reĂĄlnĂ© uplatnÄnĂ v praxi.
Of all the branches of industry, construction is the least automated. The usual methods of designing building structures are adapted to this fact, which also applies to the design of concrete reinforcement itself. The reinforcement of 2D elements such as slabs or walls is simple enough for its production to be automated, which reduces material consumption and also increases the efficiency of the use of labor force. The article discusses the design principle of reinforcement tied by the Perseus robot from XEUS - Civil Engineering Robotics, explained on the reinforcement at the bottom surface of the ceiling slab of the residential building. When creating the design methodology for such reinforcement, emphasis was placed on the immediate possibility of putting it into practice, while it will find application both in factories for the production of precast concrete and directly on the construction site.