Analﺣﺛza mobilnﺣho laserovﺣ۸ho skenovﺣ۰nﺣ ve stavebnictvﺣ
Mobilnﺣ laserovﺣ۸ skenovﺣ۰nﺣ (MLS) je v souﺥasnﺣ۸ dobﺥ bﺥﺧﺝnﺥ vyuﺧﺝﺣvﺣ۰no v ﺧadﺥ geodetickﺣﺛch aplikacﺣ. Zpﺧesnﺥnﺣ bodovﺣﺛch mraﺥen MLS se obvykle provﺣ۰dﺣ zvyﺧ۰ovﺣ۰nﺣm poﺥtu vlﺣcovacﺣch bodﺧﺁ (VB), kterﺣ۸ jsou rovnomﺥrnﺥ rozmﺣstﺥnﺣ۸ v rﺣ۰mci mapovanﺣ۸ho ﺣﭦzemﺣ. Pﺧesnost bodovﺣﺛch mraﺥen lze vylepﺧ۰it takﺣ۸ vﺣcenﺣ۰sobnﺣﺛmi prﺧﺁjezdy mobilnﺣho mapovacﺣho systﺣ۸mu (MMS). Cﺣlem tohoto ﺥlﺣ۰nku je navrhnout vhodnﺣﺛ postup, kterﺣﺛm by bylo moﺧﺝnﺣ۸ odstranit lokﺣ۰lnﺣ deformace bodovﺣﺛch mraﺥen MLS. Navrﺧﺝenﺣﺛ postup je zaloﺧﺝenﺣﺛ na porovnﺣ۰nﺣ bodovﺣﺛch mraﺥen z vﺣcenﺣ۰sobnﺣﺛch prﺧﺁjezdﺧﺁ MMS. Do mﺣst, kde rozdﺣly mezi bodovﺣﺛmi mraﺥny dosahujﺣ vﺥtﺧ۰ﺣch hodnot, jsou pak cﺣlenﺥ pﺧidﺣ۰vﺣ۰ny dalﺧ۰ﺣ VB.
1. ﺣvod
Technologie mobilnﺣho laserovﺣ۸ho skenovﺣ۰nﺣ (MLS) je v souﺥasnﺣ۸ dobﺥ vyuﺧﺝﺣvﺣ۰na pro ﺧ۰irokﺣ۸ spektrum geodetickﺣﺛch aplikacﺣ. Mraﺥna bodﺧﺁ, kterﺣ۰ jsou produktem MLS, nachﺣ۰zejﺣ uplatnﺥnﺣ zejmﺣ۸na v dopravnﺣm stavitelstvﺣ, vodnﺣm hospodﺣ۰ﺧstvﺣ, pﺧi mapovﺣ۰nﺣ pro potﺧeby katastru nemovitostﺣ a dalﺧ۰ﺣch aplikacﺣch [1, 2]. Vﺣﺛslednﺣ۰ pﺧesnost produktﺧﺁ, zaloﺧﺝenﺣﺛch na bodovﺣﺛch mraﺥnech MLS, je zﺣ۰vislﺣ۰ na mnoha faktorech – na kvalitﺥ a pﺧesnosti urﺥenﺣ trajektorie MLS, poﺥtu a konfiguraci vlﺣcovacﺣch bodﺧﺁ (VB), hustotﺥ bodovﺣﺛch mraﺥen a na algoritmech pouﺧﺝitﺣﺛch pﺧi zpracovﺣ۰nﺣ.
Geometrickou pﺧesnost mraﺥen bodﺧﺁ lze zlepﺧ۰it s vyuﺧﺝitﺣm signalizovanﺣﺛch vlﺣcovacﺣch bodﺧﺁ [3] mﺥﺧenﺣﺛch bﺥhem nﺥkolika prﺧﺁjezdﺧﺁ mobilnﺣho mapovacﺣho systﺣ۸mu (MMS) [4]. Zvyﺧ۰ovﺣ۰nﺣ poﺥtu vlﺣcovacﺣch bodﺧﺁ vede k prodluﺧﺝovﺣ۰nﺣ procesu a zvyﺧ۰ovﺣ۰nﺣ nﺣ۰kladﺧﺁ. Zﺣ۰kladnﺣm cﺣlem je minimalizace poﺥtu vlﺣcovacﺣch bodﺧﺁ pﺧi souﺥasnﺣ۸m zachovﺣ۰nﺣ pﺧijatelnﺣ۸ geometrickﺣ۸ pﺧesnosti vﺣﺛslednﺣﺛch bodovﺣﺛch mraﺥen.
Obecnﺥ existujﺣ dva zﺣ۰kladnﺣ pﺧﺣstupy pro testovﺣ۰nﺣ geometrickﺣ۸ pﺧesnosti bodovﺣﺛch mraﺥen. Prvnﺣ pﺧﺣstup je zaloﺧﺝenﺣﺛ na pﺧesnﺣ۸ sﺣti kontrolnﺣch bodﺧﺁ, jejichﺧﺝ souﺧadnice jsou porovnﺣ۰ny se souﺧadnicemi tﺥchto bodﺧﺁ, zﺣskanﺣﺛmi z mraﺥna bodﺧﺁ MLS. Druhﺣﺛ pﺧﺣstup je zaloﺧﺝenﺣﺛ na porovnﺣ۰nﺣ mraﺥna MLS s referenﺥnﺣm bodovﺣﺛm mraﺥnem, kterﺣ۸ mﺣ۰ lepﺧ۰ﺣ geometrickou pﺧesnost a ideﺣ۰lnﺥ i vﺥtﺧ۰ﺣ hustotu neﺧﺝ testovanﺣ۸ mraﺥno. Referenﺥnﺣ mraﺥno mﺧﺁﺧﺝe bﺣﺛt vytvoﺧeno napﺧﺣklad s vyuﺧﺝitﺣm terestrickﺣ۸ho laserovﺣ۸ho skenovﺣ۰nﺣ (TLS).
Porovnﺣ۰nﺣm mraﺥen z MLS a TLS se zabﺣﺛvali Johnson et al. [5], kteﺧﺣ urﺥovali pﺧesnost 4 komerﺥnﺣch MMS. Pﺧesnost vﺣﺛslednﺣﺛch bodovﺣﺛch mraﺥen dosahovala hodnoty ±80 mm v horizontﺣ۰lnﺣ sloﺧﺝce souﺧadnic a ±50 mm ve sloﺧﺝce vertikﺣ۰lnﺣ. Tyto hodnoty jsou uvedeny jako intervaly 95% spolehlivosti, tedy pﺧﺣsluﺧ۰nﺣ۸ nﺣ۰sobky smﺥrodatnﺣﺛch odchylek tﺣσ [6]. Podobnﺣ۸ testovﺣ۰nﺣ pﺧesnosti MLS provedli i Fryskowska a Wrﺣﺏblewski [7], kteﺧﺣ porovnﺣ۰vali rozmﺥry geometrickﺣﺛch parametrﺧﺁ stavebnﺣch prvkﺧﺁ (napﺧ. hran stﺧech). Odhad pﺧesnosti ﺥinil ±60 mm v horizontﺣ۰lnﺣ sloﺧﺝce souﺧadnic a ±42 mm ve sloﺧﺝce vertikﺣ۰lnﺣ (zde jsou uvﺣ۰dﺥny jednonﺣ۰sobky smﺥrodatnﺣﺛch odchylek 1ﺣσ).
Zﺣ۰sadnﺣ vliv na pﺧesnost vﺣﺛslednﺣﺛch bodovﺣﺛch mraﺥen mﺣ۰ i pﺧesnost urﺥenﺣ trajektorie MMS. ﺧ patnﺣ۸ podmﺣnky pro pozorovﺣ۰nﺣ druﺧﺝic Globﺣ۰lnﺣch navigaﺥnﺣch satelitnﺣch systﺣ۸mﺧﺁ (GNSS), ke kterﺣﺛm dochﺣ۰zﺣ zejmﺣ۸na pﺧi mapovﺣ۰nﺣ ve mﺥstech a zalesnﺥnﺣﺛch oblastech (zﺣ۰kryty oblohy budovami a stromy), vﺣﺛznamnﺥ zhorﺧ۰ujﺣ kvalitu vﺣﺛslednﺣ۸ trajektorie MMS [8]. Kvalitu trajektorie vypoﺥtenﺣ۸ z dat GNSS pomﺣ۰hajﺣ vylepﺧ۰ovat takﺣ۸ data z inerciﺣ۰lnﺣ mﺥﺧicﺣ jednotky (IMU) a z odometru (DMI). Sprﺣ۰vnﺣﺛ plﺣ۰n nﺣ۰jezdu MMS a kontrola kvality GNSS dat jsou vhodnﺣﺛmi nﺣ۰stroji pro odhad kvality trajektorie MMS.
Cﺣlem tohoto ﺥlﺣ۰nku je navrhnout vhodnﺣﺛ postup, pomocﺣ kterﺣ۸ho bude moﺧﺝnﺣ۸ odstranit lokﺣ۰lnﺣ deformace bodovﺣﺛch mraﺥen, kterﺣ۸ vznikajﺣ dﺣky nepﺧesnostem ﺥﺣ۰stﺣ trajektorie MMS.
2. MMS RIEGL VMX-450
MMS RIEGL VMX-450 (Obr. 1) je modulﺣ۰rnﺣ systﺣ۸m sklﺣ۰dajﺣcﺣ se v zﺣ۰kladnﺣ konfiguraci ze dvou laserovﺣﺛch skenerﺧﺁ RIEGL VQ-450, ﺥtyﺧ modulﺣ۰rnﺣch kamer RIEGL VMX-450-CS6, GNSS pﺧijﺣmaﺥe, IMU, odometru RIEGL VMX-450-DMI a ﺧﺣdicﺣ jednotky RIEGL VMX-450-CU. MMS je doplnﺥn o panoramatickou kameru Point Grey ladybug5. Vybranﺣ۸ parametry systﺣ۸mu jsou uvedeny v Tab. 1.


Obr. 1: MMS RIEGL VMX-450
Absolutnﺣ polohovﺣ۰ a ﺣﭦhlovﺣ۰ pﺧesnost deklarovanﺣ۰ vﺣﺛrobcem je splnitelnﺣ۰ pouze za pﺧedpokladu dobrﺣﺛch podmﺣnek pro mﺥﺧenﺣ GNSS (minimﺣ۰lnﺣ vﺣﺛpadky signﺣ۰lu), vyuﺧﺝitﺣ dat z DMI a pﺧi uﺧﺝitﺣ metody dvojitﺣﺛch diferencﺣ (pﺧipojenﺣ na referenﺥnﺣ stanici, pﺧﺣpadnﺥ sﺣﺧ۴ permanentnﺣch stanic GNSS). Hodnoty relativnﺣ polohovﺣ۸ pﺧesnosti v Tab. 1 odpovﺣdajﺣ situaci, kdy je vzdﺣ۰lenost mezi sousednﺣmi VB maximﺣ۰lnﺥ 100 m.
| Senzor | Nﺣ۰zev parametru | Hodnota parametru |
|---|---|---|
| VQ-450 | Princip mﺥﺧenﺣ | doba letu paprsku |
| Maximﺣ۰lnﺣ rychlost pulsﺧﺁ | 1,1 MHz (2 ﺣ 550 kHz) | |
| Maximﺣ۰lnﺣ rychlost otﺣ۰ﺥek zrcadla | 400 otﺣ۰ﺥek/s | |
| Vnﺥjﺧ۰ﺣ pﺧesnost | 8 mm (1ﺣσ na vzdﺣ۰lenost 50 m) | |
| Vnitﺧnﺣ pﺧesnost | 5 mm (1ﺣσ na vzdﺣ۰lenost 50 m) | |
| GNSS/IMU | Absolutnﺣ polohovﺣ۰ pﺧesnost | 0,02–0,05 m (1ﺣσ) |
| Relativnﺣ polohovﺣ۰ pﺧesnost | 0,01 m (1ﺣσ pﺧi vzdﺣ۰lenostech sousednﺣch VB < 100 m) | |
| ﺣhlovﺣ۰ pﺧesnost (roll, pitch) | 0,005ﺡﺍ (1ﺣσ) | |
| ﺣhlovﺣ۰ pﺧesnost (yaw) | 0,015ﺡﺍ (1ﺣσ) |
3. Poﺧﺣzenﺣ a zpracovﺣ۰nﺣ dat
Data MMS byla poﺧﺣzena s vyuﺧﺝitﺣm dvou 600 m dlouhﺣﺛch protismﺥrnﺣﺛch prﺧﺁjezdﺧﺁ pﺧi rychlosti vozidla 20 km/h. Mapovanﺣ۰ oblast mﺥla rozmﺥry pﺧibliﺧﺝnﺥ 190 ﺣ 90 m. Vﺣﺛﺧ۰kovﺣ۰ ﺥlenitost ﺣﭦzemﺣ (vﺥetnﺥ budov) dosahovala hodnoty 20 m. Data MLS byla poﺧizovﺣ۰na pﺧi frekvenci 1,1 MHz. Trajektorie MMS byla zpracovﺣ۰na s vyuﺧﺝitﺣm programu Applanix POSPac. Kinematickﺣ۰ GNSS data byla zpracovﺣ۰na metodou dvojitﺣﺛch diferencﺣ s pﺧipojenﺣm na sﺣﺧ۴ permanentnﺣch GNSS stanic CZEPOS. Do vﺣﺛpoﺥtu trajektorie byla zahrnuta i data z IMU a DMI.
Zpracovﺣ۰nﺣ dat MLS bylo provedeno v programu RIEGL RiPROCESS. Zpracovﺣ۰nﺣ v RiPROCESS se sklﺣ۰dﺣ۰ z konverze dat, generovﺣ۰nﺣ mraﺥen bodﺧﺁ a transformace mraﺥen bodﺧﺁ s vyuﺧﺝitﺣm vlﺣcovacﺣch bodﺧﺁ. V prvnﺣm kroku byla vytvoﺧena bodovﺣ۰ mraﺥna MLS na zﺣ۰kladﺥ trajektorie z Applanix POSPac. Nﺣ۰slednﺥ byly v tﺥchto mraﺥnech manuﺣ۰lnﺥ identifikovﺣ۰ny rovnomﺥrnﺥ rozmﺣstﺥnﺣ۸ VB v nﺥkolika variantﺣ۰ch:
- 6 VB (vzdﺣ۰lenost mezi body do 100 m v souladu s doporuﺥenﺣm vﺣﺛrobce; viz Tab. 1),
- 10 VB,
- 13 VB (vzdﺣ۰lenost mezi body 50 m; dvojnﺣ۰sobnﺣ۰ hustota VB oproti variantﺥ 6 VB),
- 6+2 VB (6 rovnomﺥrnﺥ rozmﺣstﺥnﺣﺛch VB + 2 VB cﺣlenﺥ pﺧidanﺣ۸ do problematickﺣﺛch oblastﺣ, viz kap. 3).
Pouﺧﺝitﺣ۸ VB jsou souﺥﺣ۰stﺣ testovacﺣho pole, kterﺣ۸ mﺣ۰ vﺣﺛznamnﺥ vyﺧ۰ﺧ۰ﺣ pﺧesnost, neﺧﺝ je oﺥekﺣ۰vanﺣ۰ pﺧesnost vﺣﺛsledkﺧﺁ MLS. Odhad hodnoty prostorovﺣ۸ smﺥrodatnﺣ۸ odchylky VB s3D = ±2,0 mm [10]. Zpﺧesnﺥnﺣ trajektorie MMS na zﺣ۰kladﺥ vlﺣcovﺣ۰nﺣ bylo provedeno s vyuﺧﺝitﺣm modulu RiPRECISION. Vﺣﺛsledkem zpracovﺣ۰nﺣ byla dvﺥ bodovﺣ۰ mraﺥna (ze dvou protismﺥrnﺣﺛch prﺧﺁjezdﺧﺁ MMS), pﺧiﺥemﺧﺝ kaﺧﺝdﺣ۸ z nich obsahovalo pﺧibliﺧﺝnﺥ 123 000 000 bodﺧﺁ.



Obr. 2: Konfigurace 6 VB (vlevo), 10 VB (uprostﺧed), 13 VB (vpravo)
Referenﺥnﺣ TLS mraﺥno bylo vytvoﺧeno na zﺣ۰kladﺥ mﺥﺧenﺣ dvﺥma pozemnﺣmi laserovﺣﺛmi skenery Faro Focus3D X 130. Referenﺥnﺣ TLS mraﺥno bylo vlﺣcovﺣ۰no na body testovacﺣho pole. Odhad hodnoty prostorovﺣ۸ smﺥrodatnﺣ۸ odchylky referenﺥnﺣho TLS mraﺥna s3D = ±8,5 mm. Filtrace mraﺥen MLS a nﺣ۰slednﺣ۸ porovnﺣ۰nﺣ s referenﺥnﺣm mraﺥnem TLS bylo provedeno v programu CloudCompare v2.11.
Nejdﺧﺣve byla porovnﺣ۰na mraﺥna z prvnﺣho a druhﺣ۸ho prﺧﺁjezdu MMS mezi sebou, potﺣ۸ kaﺧﺝdﺣ۸ zvlﺣ۰ﺧ۰ﺧ۴ s referenﺥnﺣm TLS mraﺥnem. Do 2 problematickﺣﺛch oblastﺣ, identifikovanﺣﺛch ve variantﺥ s 6 VB (vzdﺣ۰lenost mezi VB 100 m), byly cﺣlenﺥ pﺧidﺣ۰ny 2 VB (viz kap. 3). Nﺣ۰slednﺥ byla mraﺥna z prvnﺣho a druhﺣ۸ho prﺧﺁjezdu MMS spojena a porovnﺣ۰na s referenﺥnﺣm TLS mraﺥnem. Provedena byla i kontrola kvality (QC) GNSS dat s vyuﺧﺝitﺣm software G-Nut / Anubis [11].
Veﺧ۰kerﺣ۰ porovnﺣ۰nﺣ bodovﺣﺛch mraﺥen a nﺣ۰slednﺣ۸ analﺣﺛzy jejich pﺧesnosti byly ﺧeﺧ۰eny pouze ve vertikﺣ۰lnﺣ sloﺧﺝce souﺧadnic. Pro jednotlivﺣ۸ varianty byly vypoﺥteny globﺣ۰lnﺣ charakteristiky pﺧesnosti v podobﺥ odhadﺧﺁ vertikﺣ۰lnﺣ smﺥrodatnﺣ۸ odchylky sv (konfidenﺥnﺣ interval 68 %). Dﺣ۰le byly podle [10] jednotlivﺣ۸ varianty testovﺣ۰ny na relativnﺣ ﺥetnost vﺣﺛskytu vyboﺥujﺣcﺣch (5% kritickﺣ۰ hodnota) a odlehlﺣﺛch (1% kritickﺣ۰ hodnota) hodnot rozdﺣlﺧﺁ. Zvlﺣ۰ﺧ۰ﺧ۴ byla testovﺣ۰na pﺧesnost i ve 2 identifikovanﺣﺛch problematickﺣﺛch oblastech.
4. Vﺣﺛsledky
V nﺣ۰sledujﺣcﺣch obrﺣ۰zcﺣch jsou vizualizovﺣ۰ny vertikﺣ۰lnﺣ sloﺧﺝky rozdﺣlﺧﺁ mezi mraﺥny. Obr. 3 znﺣ۰zorﺧuje porovnﺣ۰nﺣ mraﺥna z prvnﺣho prﺧﺁjezdu s mraﺥnem z druhﺣ۸ho prﺧﺁjezdu MMS ve variantﺥ 6 VB (vzdﺣ۰lenost VB nepﺧekroﺥila 100 m dle doporuﺥenﺣ vﺣﺛrobce viz kap. 2). V Obr. 3 lze identifikovat dvﺥ oblasti s vﺣﺛznamnﺣﺛmi rozdﺣly mezi mraﺥny. Porovnﺣ۰nﺣ bodovﺣﺛch mraﺥen z prvnﺣho a druhﺣ۸ho prﺧﺁjezdu MMS s referenﺥnﺣm TLS mraﺥnem je znﺣ۰zornﺥno na Obr. 4. Z obrﺣ۰zku je patrnﺣ۸, ﺧﺝe k deformacﺣm mraﺥna (tedy nepﺧesnostem v trajektorii MMS) doﺧ۰lo zejmﺣ۸na bﺥhem druhﺣ۸ho prﺧﺁjezdu MMS.
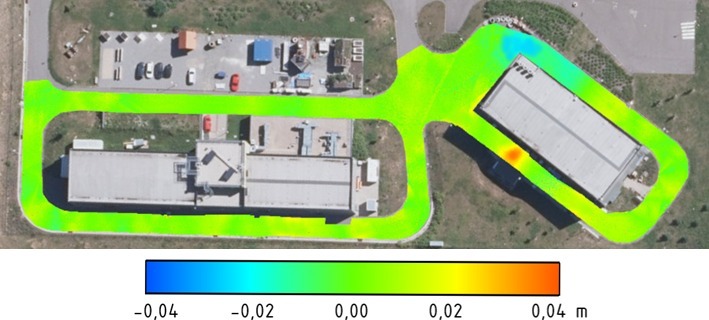
Obr. 3: Rozdﺣly bodovﺣﺛch mraﺥen ze dvou protismﺥrnﺣﺛch prﺧﺁjezdﺧﺁ MMS
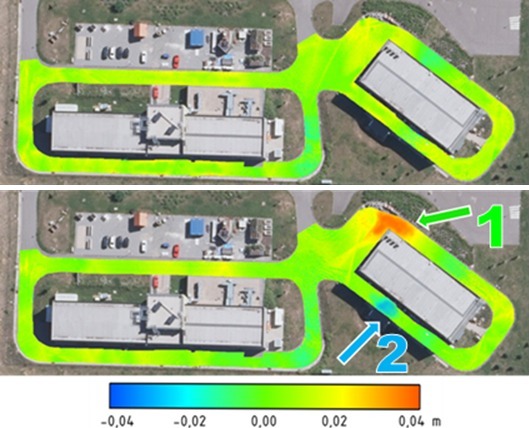
Obr. 4: Rozdﺣl referenﺥnﺣho TLS mraﺥna a mraﺥna MLS z prvnﺣho (nahoﺧe) a druhﺣ۸ho (dole) prﺧﺁjezdu
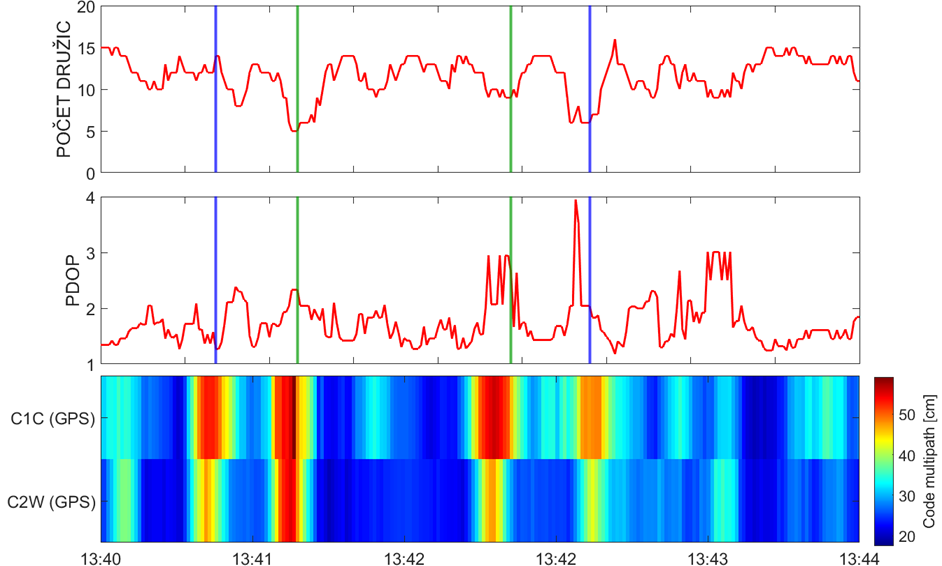
Obr. 5: Vybranﺣ۸ vﺣﺛsledky QC: poﺥet druﺧﺝic (nahoﺧe), PDOP (uprostﺧed), multipath (dole)
Vybranﺣ۸ vﺣﺛsledky QC z G-Nut / Anubis znﺣ۰zorﺧuje Obr. 5. Svislﺣ۸ ﺥﺣ۰ry v Obr. 5 jsou v ﺥﺣ۰stech trajektorie, kterﺣ۸ odpovﺣdajﺣ problematickﺣﺛm oblastem v mraﺥnech MMS (v Obr. 4 jsou oznaﺥeny ﺧ۰ipkami odpovﺣdajﺣcﺣ barvy). V tﺥchto ﺥﺣ۰stech trajektorie doﺧ۰lo ke znaﺥnﺣ۸mu poklesu poﺥtu druﺧﺝic a nﺣ۰rﺧﺁstu hodnoty PDOP. Zﺣ۰roveﺧ vﺣﺛznamnﺥ vzrostla hodnota multipath (tj. chyby v mﺥﺧenﺣch GNSS vznikajﺣcﺣ v dﺧﺁsledku odrazu signﺣ۰lﺧﺁ od objektﺧﺁ).
Porovnﺣ۰nﺣ bodovﺣﺛch mraﺥen z prvnﺣho a druhﺣ۸ho prﺧﺁjezdu MMS s referenﺥnﺣm TLS mraﺥnem ve variantﺥ 6+2 VB je znﺣ۰zornﺥno na Obr. 6. Z tohoto obrﺣ۰zku je patrnﺣ۸, ﺧﺝe dﺣky cﺣlenﺣ۸mu pﺧidﺣ۰nﺣ jednoho VB do kaﺧﺝdﺣ۸ inkriminovanﺣ۸ oblasti (celkem 2) byly odstranﺥny lokﺣ۰lnﺣ deformace, kterﺣﺛmi trpﺥlo mraﺥno z druhﺣ۸ho prﺧﺁjezdu MMS.
Porovnﺣ۰nﺣ vﺣﺛslednﺣﺛch bodovﺣﺛch MLS mraﺥen z variant 6+2 VB (vzdﺣ۰lenost mezi body 100 m), 10 VB a 13 VB (vzdﺣ۰lenost mezi body 50 m) s referenﺥnﺣm TLS mraﺥnem je zobrazeno na Obr. 7.
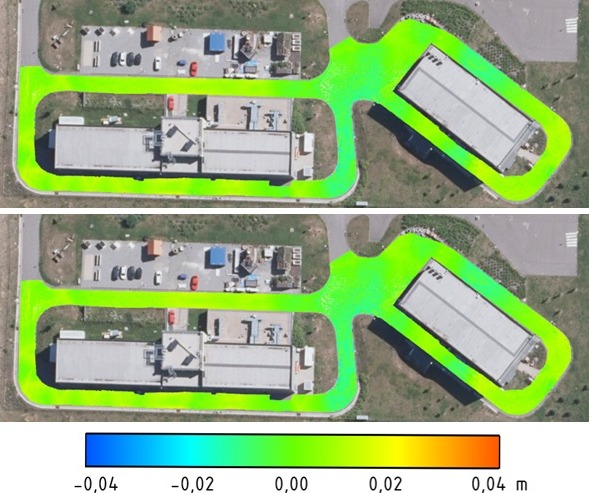
Obr. 6: Porovnﺣ۰nﺣ referenﺥnﺣho TLS bodovﺣ۸ho mraﺥna a bodovﺣ۸ho mraﺥna MLS z prvnﺣho (nahoﺧe) a druhﺣ۸ho (dole) prﺧﺁjezdu po pﺧidﺣ۰nﺣ 2 VB

Obr. 7: Porovnanﺣ referenﺥnﺣho TLS bodovﺣ۸ho mraﺥna s bodovﺣﺛmi MLS mraﺥny vlﺣcovanﺣﺛmi na 6+2 VB (nahoﺧe), 10 VB (uprostﺧed) a 13 VB (dole)
Globﺣ۰lnﺣ charakteristiky pﺧesnosti vﺣﺛslednﺣﺛch bodovﺣﺛch mraﺥen z jednotlivﺣﺛch variant v podobﺥ odhadﺧﺁ hodnot vertikﺣ۰lnﺣch smﺥrodatnﺣﺛch odchylek a relativnﺣch ﺥetnostﺣ vyboﺥujﺣcﺣch a odlehlﺣﺛch hodnot rozdﺣlﺧﺁ jsou uvedeny v Tab. 1. Procentuﺣ۰lnﺣ zastoupenﺣ vyboﺥujﺣcﺣch/odlehlﺣﺛch hodnot z jednotlivﺣﺛch variant, kterﺣ۸ pﺧipadajﺣ do 2 identifikovanﺣﺛch problﺣ۸movﺣﺛch oblastﺣ (viz Obr. 4) je uvedeno v Tab. 3.
| Varianta | sV [mm] | ||
|---|---|---|---|
| Sv | % vyboﺥujﺣcﺣch | % odlehlﺣﺛch | |
| 6 VB | 8,4 | 2,8 | 2,1 |
| 6+2 VB | 7,1 | 2,1 | 1,3 |
| 10 VB | 8,2 | 2,6 | 1,7 |
| 13 VB | 7,9 | 2,5 | 1,5 |
| Varianta | OBLAST 1 | OBLAST 2 | ||
|---|---|---|---|---|
| % vyboﺥujﺣcﺣch | % odlehlﺣﺛch | % vyboﺥujﺣcﺣch | % odlehlﺣﺛch | |
| 6 VB | 28,1 | 44,4 | 23,0 | 36,7 |
| 6+2 VB | 7,0 | 2,7 | 4,1 | 1,3 |
| 10 VB | 13,4 | 20,3 | 9,2 | 14,3 |
| 13 VB | 6,2 | 1,3 | 4,1 | 1,1 |
5. Zﺣ۰vﺥr
ﺧ patnﺣ۸ observaﺥnﺣ podmﺣnky GNSS mohou zpﺧﺁsobovat chyby v trajektorii MMS a nﺣ۰slednﺥ lokﺣ۰lnﺣ deformace v mraﺥnech MLS. Pouﺧﺝitﺣ vlﺣcovacﺣch bodﺧﺁ vﺣﺛznamnﺥ zlepﺧ۰uje pﺧesnost vﺣﺛsledkﺧﺁ MLS. Nﺣ۰rﺧﺁst poﺥtu VB vede k vﺥtﺧ۰ﺣ ﺥasovﺣ۸ a ekonomickﺣ۸ nﺣ۰roﺥnosti procesu, ploﺧ۰nﺣ۸ zvyﺧ۰ovﺣ۰nﺣ hustoty VB se tudﺣﺧﺝ nejevﺣ jako optimﺣ۰lnﺣ.
Z testovﺣ۰nﺣ vyplﺣﺛvﺣ۰, ﺧﺝe vﺣﺛslednﺣ۰ pﺧesnost mraﺥna MLS ani pﺧi extrﺣ۸mnﺣ hustotﺥ rovnomﺥrnﺥ rozloﺧﺝenﺣﺛch VB (dvojnﺣ۰sobek doporuﺥenﺣ vﺣﺛrobce) nenﺣ vyﺧ۰ﺧ۰ﺣ, neﺧﺝ pﺧesnost mraﺥna s hustotou vlﺣcovacﺣch bodﺧﺁ dle doporuﺥenﺣ vﺣﺛrobce a cﺣlenﺥ pﺧidanﺣﺛmi VB pouze do oblastﺣ, kde vlivem ﺧ۰patnﺣﺛch GNSS podmﺣnek doﺧ۰lo k deformacﺣm mraﺥen MLS.
Odstranﺥnﺣ deformacﺣ u variant rovnomﺥrnﺥ rozmﺣstﺥnﺣﺛch VB (10, 13) je zﺣ۰vislﺣ۸ na tom, jak daleko se nachﺣ۰zﺣ nejbliﺧﺝﺧ۰ﺣ vlﺣcovacﺣ bod od deformovanﺣ۸ oblasti.
Jako optimﺣ۰lnﺣ se jevﺣ rovnomﺥrnﺣ۸ vlﺣcovﺣ۰nﺣ v souladu s pokyny vﺣﺛrobce (vzdﺣ۰lenost mezi VB < 100 m) spoleﺥnﺥ s provedenﺣm minimﺣ۰lnﺥ 2 protismﺥrnﺣﺛch prﺧﺁjezdﺧﺁ MMS. Porovnﺣ۰nﺣ bodovﺣﺛch mraﺥen z jednotlivﺣﺛch prﺧﺁjezdﺧﺁ MMS pak mﺧﺁﺧﺝe indikovat mﺣsta vhodnﺣ۰ k dovlﺣcovﺣ۰nﺣ dalﺧ۰ﺣmi VB. Jako pﺧidﺣ۰vanﺣ۸ VB pak mohou bﺣﺛt vybrﺣ۰ny i vhodnﺣ۸ pﺧirozenﺣ۸ objekty, kterﺣ۸ jsou dobﺧe identifikovatelnﺣ۸ v bodovﺣﺛch mraﺥnech TLS. Cﺣlenﺣ۸ pﺧidﺣ۰nﺣ VB do identifikovanﺣﺛch problematickﺣﺛch oblastﺣ mﺧﺁﺧﺝe vﺣﺛznamnﺥ zvﺣﺛﺧ۰it zejmﺣ۸na lokﺣ۰lnﺣ pﺧesnost bodovﺣﺛch mraﺥen MLS bez vﺣﺛznamnﺣ۸ho navﺣﺛﺧ۰enﺣ nﺣ۰kladﺧﺁ celﺣ۸ zakﺣ۰zky.
6. Literatura
- AL-BAYARI, Omar. Mobile mapping systems in civil engineering projects (case studies). Applied Geomatics. 2019, 11(1), 1-13. ISSN 1866-9298. Dostupnﺣ۸ z: https://doi.org/10.1007/s12518-018-0222-6
- WANG, CH et al. A Survey of Mobile Laser Scanning Applications and Key Techniques over Urban Areas. Remote Sensing. 2019, 11(13). ISSN 2072-4292. Dostupnﺣ۸ z: https://doi.org/10.3390/rs11131540
- SCHAER, P.; VALLET J. Trajectory Adjustment of Mobile Laser Scan Data In GPS Denied Enviroments. ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2016, XL-3/W4, 61-64. ISSN 2194-9034. Dostupnﺣ۸ z: https://doi.org/10.5194/isprsarchives-XL-3-W4-61-2016
- NOLAN, J. et al. Multi-Pass Approach for Mobile Terrestrial Laser Scanning. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2015, II-3/W5, 105-112. ISSN 2194-9050. Dostupnﺣ۸ z:
https://doi.org/10.5194/isprsannals-II-3-W5-105-2015 - JOHNSON, S. D. et al. Laser mobile mapping standards and applications in transportation: Joint Transportation Research Program Publication No. FHWA/IN/JTRP-2016/01. Purdue University, 2016. Dostupnﺣ۸ z:
https://doi.org/10.5703/1288284316164 - HAMPACHER, M.; ﺧ TRONER, M. Zpracovﺣ۰nﺣ a analﺣﺛza mﺥﺧenﺣ v inﺧﺝenﺣﺛrskﺣ۸ geodﺣ۸zii. Vydﺣ۰nﺣ druhﺣ۸, upravenﺣ۸ a doplnﺥnﺣ۸. Praha: ﺥeskﺣ۸ vysokﺣ۸ uﺥenﺣ technickﺣ۸ v Praze, 2015. ISBN 978-80-01-05843-5.
- FRYSKOWSKA, A.; WRﺣBLEWSKI P. Mobile Laser Scanning accuracy assessment for the purpose of base-map updating. Geodesy and Cartography. 2018, 67(1), 35-55. Dostupnﺣ۸ z: https://doi.org/10.24425/118701
- HUSSNAIN, Z. el al. Enhanced trajectory estimation of mobile laser scanners using aerial images. ISPRS Journal of Photogrammetry and Remote Sensing [online]. 2021, 173, 66-78. ISSN 09242716. Dostupnﺣ۸ z:
https://doi.org/10.1016/j.isprsjprs.2021.01.005 - Riegl Laser Measurement Systems GmBH, RIEGL VMX-450: Compact Mobile Laser System, Data Sheet, 2015.
- KALVODA, P. et al. Accuracy Evaluation and Comparison of Mobile Laser Scanning and Mobile Photogrammetry Data. IOP Conference Series: Earth and Environmental Science. 2020, 609. ISSN 1755-1315. Dostupnﺣ۸ z:
https://doi.org/10.1088/1755-1315/609/1/012091 - VACLAVOVIC, P.; DOUSA, J. G-Nut/Anubis: Open-Source Tool for Multi-GNSS Data Monitoring with a Multipath Detection for New Signals, Frequencies and Constellations. RIZOS, Chris a Pascal WILLIS, ed. IAG 150 Years. Cham: Springer International Publishing, 2016, 2015-5-7, s. 775–782. International Association of Geodesy Symposia. ISBN 978-3-319-24603-1. Dostupnﺣ۸ z: https://doi.org/10.1007/1345_2015_97
Podﺥkovﺣ۰nﺣ
ﺥlﺣ۰nek vznikl v rﺣ۰mci ﺧeﺧ۰enﺣ projektu Specifickﺣ۸ho vﺣﺛzkumu VUT v Brnﺥ FAST-S-21-7484.
ﺥlﺣ۰nek je aktuﺣ۰lnﺣ, dobﺧe zpracovanﺣﺛ, prospﺥﺧ۰nﺣﺛ nejenom pro samotnou geodﺣ۸zii, ale pro celou oblast stavebnictvﺣ a vodnﺣho hospodﺣ۰ﺧstvﺣ. Doporuﺥuji k vydﺣ۰nﺣ.
Mobile laser scanning (MLS) is currently commonly used in many surveying applications. The refinement of MLS point clouds is usually done by increasing the number of control points (CP) equally distributed within the mapped area. The accuracy of point clouds can also be improved by multiple passes of the mobile mapping system (MMS). This paper deals with the proposal of a suitable procedure by which it would be possible to remove local deformations of MLS point clouds. The proposed approach is based on the comparison of point clouds from multiple MMS passes. Additional CPs are then added to the places where the more significant differences between the point clouds.