Diagnostika stavebnÃ―ch objektov metÃģdou mobilnÃĐho 3D skenovania

© Fotolia.com
PrÃspevok je orientovanÃ― na zhodnotenie moÅūnostà vyuÅūitia diagnostiky stavebnÃ―ch objektov a vÃ―stupov procesu mobilnÃĐho 3D skenovania existujÚcich objektov a ich Úpravy prostrednÃctvom softvÃĐrovej transformÃĄcie do prostredia BIM (Building Information Modeling). DÃīraz je kladenÃ― na problematiku vytvÃĄrania informaÄnÃĐho modelu stavebnÃĐho objektu na zÃĄklade point cloudu urÄenÃĐho mobilnÃ―m 3D mapovanÃm. HlavnÃ―m cieÄūom bolo spracovanie nameranÃ―ch dÃĄt mobilnÃĐho mapovania, realizÃĄcia Úkonov importu tÃ―chto dÃĄt do programovÃĐho prostredia Autodesk Revit a vytvorenie BIM modelu. PridruÅūenÃ―m cieÄūom bolo porovnanie vÃ―slednÃĐho objektu pochÃĄdzajÚceho z point cloudu s existujÚcou projektovou dokumentÃĄciou. Zhodnotenie celÃĐho procesu prostrednÃctvom SWOT analÃ―zy predstavuje zÃĄver prÃspevku.
ÄlÃĄnek byl ocenÄn a vydÃĄn v rÃĄmci 21. roÄnÃku odbornÃĐ konference doktorskÃĐho studia Juniorstav.
1 Ãvod
Priemysel, ako aj celÃĐ ÅūivotnÃĐ prostredie Äloveka je do citeÄūnej miery poznaÄenÃĐ integrÃĄciou modernÃ―ch a inovatÃvnych technolÃģgiÃ, priÄom stavebnÃctvo ako vÃ―znamnÃĄ sÚÄasÅĨ hospodÃĄrstva rozvÃjajÚcich sa krajÃn EÃ, nemÃīÅūe byÅĨ vÃ―nimkou. NajmÃĪ z titulu znaÄnej miery senzitivity, ktorÚ bolo moÅūnÃĐ zachytiÅĨ v krÃzovom obdobÃ, je nutnÃĐ si uvedomiÅĨ skutoÄnosÅĨ, Åūe budÚcimi faktormi Åūiaducej miery konkurencieschopnosti odvetvia je nÃĄvrh a zavÃĄdzanie nÃĄstrojov, ktorÃĐ v sebe integrujÚ kroky systematickÃĐho manaÅūÃĐrskeho riadenia, prihliadania na efektÃvne ekonomickÃĐ prÃstupy a v neposlednom rade integrÃĄciu pokroÄilÃ―ch technickÃ―ch a technologickÃ―ch procesov. Do tejto skupiny procesov je moÅūnÃĐ zaradiÅĨ napr. zavÃĄdzanie metÃģd spracovania investÃcie (realizÃĄcie stavebnej zÃĄkazky) prepÃĄjajÚcich vyuÅūitie pokroÄilej technolÃģgie zÃskavania nevyhnutnÃ―ch iniciaÄnÃ―ch Údajov (dÃĄtovÃ―ch vstupov) formou 3D laserovÃĐho skenovania jestvujÚceho stavu objektov a pokroÄilÃĐ softvÃĐrovÃĐ rieÅĄenia z prostredia BIM (Building Information Modeling) ako nÃĄstroja pre spracovanie takto zÃskanej dokumentÃĄcie.
AplikÃĄcia danÃĐho postupu predstavuje vÃ―chodisko pre nÃĄslednÃĐ a prÃbuznÃĐ aktivity spojenÃĐ s realizÃĄciou nevyhnutnÃ―ch Äastà stavebnÃĐho investiÄnÃĐho zÃĄmeru, akÃ―mi sÚ napr. projekcia, ocenenie stavebnej zÃĄkazky alebo tzv. „Facility management“.
Na tomto mieste je vhodnÃĐ uviesÅĨ, Åūe aplikÃĄcia 2D a 3D laserovÃĐho skenovania bola a stÃĄle je veÄūmi populÃĄrna v geografickÃ―ch a geodetickÃ―ch Äinnostiach, avÅĄak v prepojenà s BIM nÃĄstrojmi dostÃĄva tÃĄto technolÃģgia v prostredà stavebnÃctva novÃ― rozmer a vÃ―znam. JednÃ―m z vÃ―znamnÃ―ch dÃīvodov preÄo presadzovaÅĨ BIM systÃĐmy vo svete je aj snaha o redukciu nÃĄkladov spojenÃ―ch s realizÃĄciou stavebnÃ―ch projektov. V spoluprÃĄci s aktivitami spoÄÃvajÚcimi v digitÃĄlnom spracovanà dÃĄt umoÅūÅuje rÃ―chlu manipulÃĄciu s informÃĄciami, eliminuje rizikÃĄ spojenÃĐ s moÅūnosÅĨami vzniku chÃ―b spÃīsobenÃ―ch naprÃklad zlÃ―m zÃĄpisom, nÃĄÄrtom alebo nepravdivou interpretÃĄciou zÃĄpisu v rÃĄmci spoluprÃĄce medzi vykonÃĄvateÄūom meranà in situ a spracovateÄūom 3D modelu.
2 Diagnostika stavebnÃ―ch objektov
VyuÅūÃvanie kompletnÃ―ch Údajov zÃskanÃ―ch pomocou nedeÅĄtruktÃvnej diagnostiky je hlavnÃ―m zdrojom vstupnÃ―ch informÃĄcià pre analÃ―zu stavu stavebnÃ―ch objektov, vyhodnotenie a vÄasnÃĐ nÃĄvrhy opatrenÃ, ktorÃĐ zabezpeÄia dodrÅūanie alebo predÄšÅūenie Åūivotnosti stavebnÃ―ch objektov. SpracovanÃĐ vÃ―sledky sÚ vhodnÃ―m zÃĄkladom pre plÃĄnovanie a efektÃvne rozmiestnenie prostriedkov – vznikÃĄ sÚvislosÅĨ medzi disponibilnÃ―mi prostriedkami (ÚdrÅūba, opravy) a kvalitou danÃ―ch objektov. Zavedenie zberu Údajov pomocou nedeÅĄtruktÃvnej diagnostiky vedie k celkovej objektivizÃĄcià v rozdeÄūovanà prostriedkov zÃĄroveÅ ovplyvÅuje kvalitu stavebnÃ―ch objektov.
MobilnÃ― 3D skenovanie – mobilnÃ― mapovacà systÃĐm MMS
LaserovÃĐ skenovanie je v sÚÄasnej dobe najmodernejÅĄia a bezkonkurenÄne najefektÃvnejÅĄia metÃģda diagnostiky a hromadnÃĐho zberu presnÃ―ch priestorovÃ―ch dÃĄt. VeÄūkou vÃ―hodou je zameranie obrovskÃĐho mnoÅūstva bodov za krÃĄtky Äas a moÅūnosÅĨ merania aj v ÅĨaÅūko prÃstupnÃ―ch priestoroch. LaserovÃ― skener vyuÅūÃva pulzovÚ laserovÚ technolÃģgiu. VÃ―stupom je mraÄno bodov – stovky miliÃģnov bodov s priestorovÃ―mi sÚradnicami. Ku kaÅūdÃĐmu bodu mÃīÅūu byÅĨ priradenÃĐ aj informÃĄcie o farbe a intenzite. Takouto metÃģdou zÃskanÃĐ virtuÃĄlne modely vykazujÚ minimÃĄlnu stratu informÃĄcià o svojich rozmeroch a tvaroch. [1] [2]
MobilnÃ― mapovacà systÃĐm (MMS) je vo svojej podstate nedeÅĄtruktÃvna diagnostika, ktorÃĄ umoÅūÅuje bezkontaktnÃĐ urÄenie priestorovÃ―ch sÚradnÃc bodov, prostrednÃctvom senzorov a prÃsluÅĄnÃĐho vyhodnocovacieho softvÃĐru, ktorÃĐ sÚ sÚÄasÅĨou vozidla Lynx SG1. MobilnÃ― laserovÃ― skener je schopnÃ― zhromaÅūdiÅĨ obrovskÃĐ mnoÅūstvo bodov aÅū 1,26 bodov/sekunda (tzv. mraÄno bodov, resp. point cloud Obr. 1 vpravo) s minimÃĄlnym rozstupom vo veÄūmi krÃĄtkom Äase. ProstrednÃctvom kamery sÚ poÄas skenovania zÃskanÃĐ tieÅū digitÃĄlne fotografie, na zÃĄklade ktorÃ―ch je moÅūnÃĐ jednotlivÃ―m bodom priradiÅĨ ich reÃĄlnu farbu. VÃ―stupom skenovania teda mÃīÅūe byÅĨ mraÄno bodov s vysokou hustotou, alebo 3D model v reÃĄlnych farbÃĄch umiestnenÃ― v poÅūadovanom sÚradnicovom systÃĐme. [3]
MobilnÃĐ skenovanie alebo inÃ―mi slovami – mobilnÃĐ mapovanie vÅĄeobecne spoÄÃva v zhromaÅūÄovanà Údajov pomocou mobilnÃĐho mapovacieho zariadenia, spracovanà nameranÃ―ch Údajov (tzv. post-processing) a nÃĄslednom spracovanà mraÄna bodov (tzv. point cloud processing). Pre zhromaÅūÄovanie Údajov v terÃĐne kombinuje mobilnÃĐ mapovacie zariadenie viacero technolÃģgià naraz (zariadenie LiDAR, globÃĄlny navigaÄnÃ― satelitnÃ― systÃĐm, inerciÃĄlne meracie jednotky a jednotku merania vzdialenosti).
VÃ―sledkom diagnostiky a zberu dÃĄt v terÃĐne prostrednÃctvom mobilnÃĐho mapovacieho systÃĐmu sÚ teda Údaje z GNSS antÃĐn namontovanÃ―ch na vozidle, observaÄnÃĐ Ãšdaje zo zÃĄkladnej (statickej) stanice GNSS, dÃĄta z jednotiek IMU a DMI, taktieÅū Údaje z fotografià zÃskanÃ―ch prostrednÃctvom digitÃĄlnych kamier a mraÄno bodov. VÅĄetky tieto dÃĄta slÚÅūia ako vstupnÃĐ Ãšdaje pre nÃĄslednÃĐ spracovanie tzv. post-processing. Pod pojmom post-processing mÃĄme na mysli ÄalÅĄie spracovanie a zdokonalenie nameranÃ―ch Údajov. VÃ―sledkom je mraÄno bodov (point cloud – Obr. 1 vpravo) umiestnenÃĐ vo vybranom sÚradnicovom systÃĐme, ktorÃĐ mÃĄ informÃĄcie o farbe, polohe, vÃ―ÅĄke a intenzite kaÅūdÃĐho bodu. NÃĄslednÃĐ spracovanie zahÅÅa klasifikÃĄciu mraÄna bodov podÄūa zvolenÃ―ch kritÃĐrià (napr. intenzita odrazu, farba bodov, nadmorskÃĄ vÃ―ÅĄka). Je to dÃīleÅūitÃ― proces, pri ktorom je moÅūnÃĐ pouÅūitÃm vhodnÃ―ch nÃĄstrojov oddeliÅĨ jednotlivÃĐ prvky v mapovanej oblasti (vegetÃĄcie, stromy, budovy, elektrickÃĐ vedenia a pod.). V zÃĄvislosti od poÅūadovanÃ―ch vÃ―sledkov z mobilnÃĐho mapovania je moÅūnÃĐ nÃĄsledne vektorizovaÅĨ mraÄno bodov (napr. terÃĐnne okraje, budovy) pomocou modelovania jednotlivÃ―ch objektov alebo vykonaÅĨ analÃ―zy v aplikÃĄciÃĄch GIS. [3] [4]
3 Diagnostika 3D mobilnÃ―m skenovacÃm systÃĐmom
Pred samotnÃ―m zaÄatÃm mapovania bolo nutnÃĐ sa uistiÅĨ, Åūe prognÃģza poÄasia predpovedÃĄ dobrÃĐ jazdnÃĐ vlastnosti a atmosfÃĐrickÃĐ podmienky pre meranie, ktorÃĐ zahÅÅajÚ naprÃklad teplotu ovzduÅĄia v rozmedzà −10 ̊C aÅū +40 ̊C, vÅĄak v prÃpade ak sÚ kamery vypnutÃĐ mÃīÅūe Lynx pracovaÅĨ aj pri teplotÃĄch −20 ̊C, minimÃĄlne mnoÅūstvo zrÃĄÅūok (dÃĄÅūÄ, krÚpy, sneh, hmla) a takisto vhodnÃĐ atmosfÃĐrickÃĐ podmienky bez zneÄistenia oparom, dymom a pod. Pri mapovanà bol vyuÅūÃvanÃ― skener mobilnÃ― – Obr. 1 vÄūavo (a z toho dÃīvodu bolo nutnÃĐ vykonaÅĨ obhliadku budovy, aby bol zabezpeÄenÃ― voÄūnÃ― a plynulÃ― prechod automobilu okolo celÃĐho stavebnÃĐho objektu.

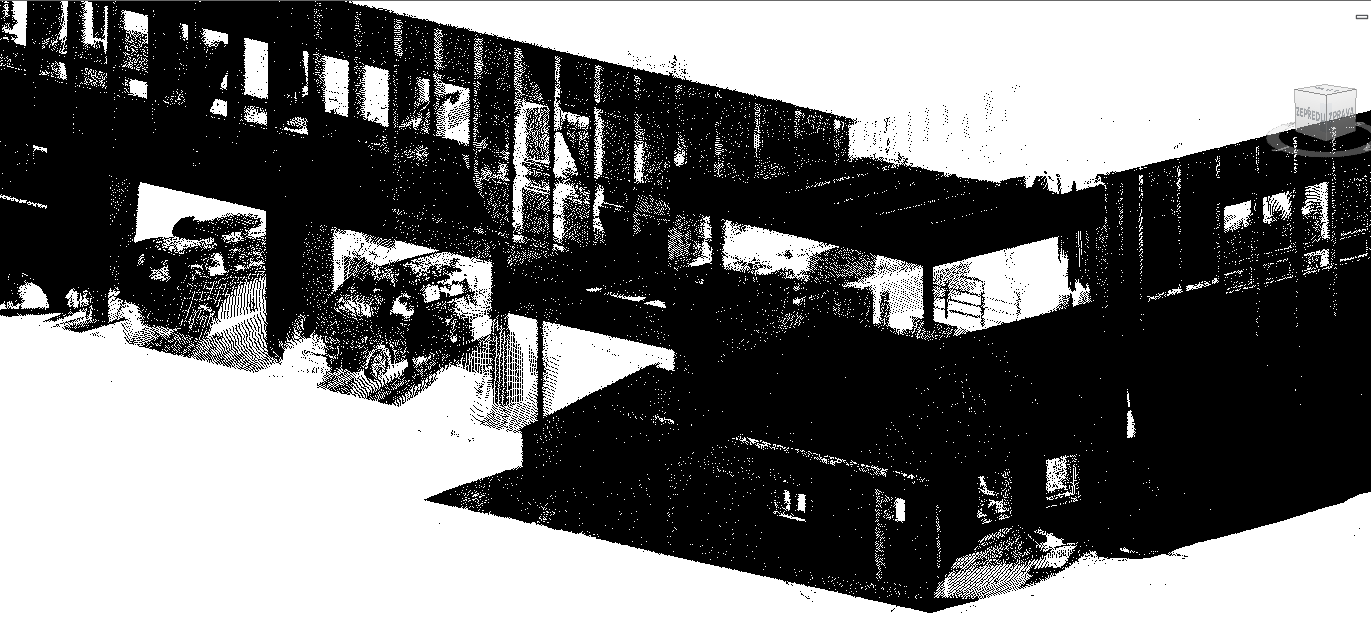
Obr. 1 MobilnÃ― skener poÄas merania HospodÃĄrskeho bloku Å―U (vÄūavo), point cloud objektu (vpravo)
Pred vykonanÃm samotnej diagnostiky je potrebnÃĐ ponechaÅĨ mobilnÃ― skener zameraÅĨ svoju polohu 5 minÚt staticky (stojace vozidlo) a 5 minÚt dynamicky (dynamickÃĄ jazda s vozidlom), ÄÃm sa zamerajÚ na zÃĄklade GPS (Global Positioning System), POS (Position Orientation System) a IMU (Inertial measurement unit) presnÃĐ geografickÃĐ Ãšdaje o polohe. [2] [4]

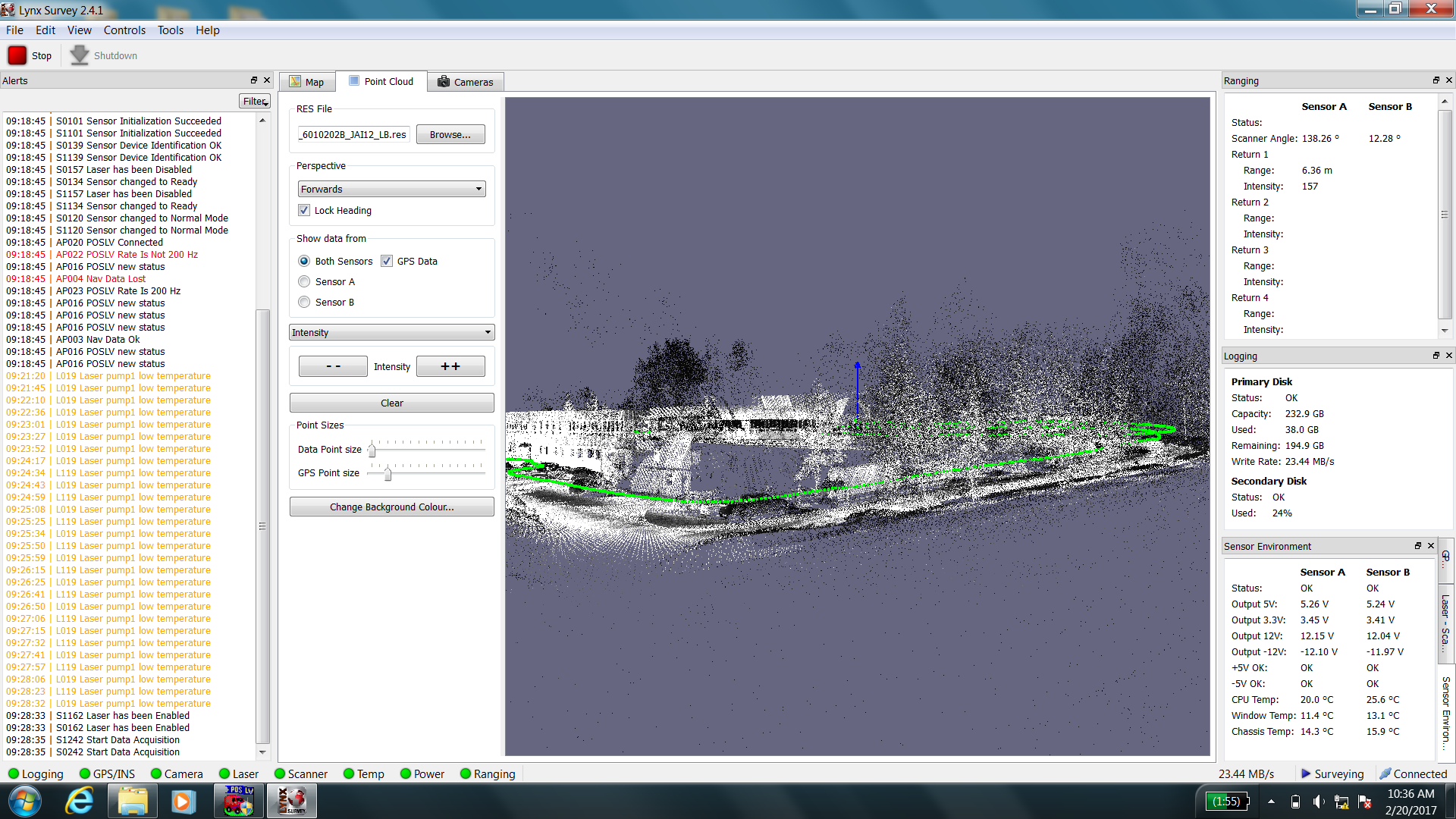
Obr. 2 Sledovanie zberu dÃĄt (vÄūavo), aktuÃĄlne zobrazenia nameranÃ―ch dÃĄt (vpravo) poÄas jazdy vozidlom
Pri jazde s vozidlom Lynx a poÄas zberu dÃĄt je nutnÃĐ sledovaÅĨ systÃĐm pre maximalizÃĄciu kvality (Obr. 2). MonitorovanÃm systÃĐmu poÄas prieskumu je moÅūnÃĐ predÃsÅĨ zlyhaniu systÃĐmu, strate dÃĄt, prÃpadne zlepÅĄiÅĨ zber a presnosÅĨ dÃĄt. Po ukonÄenà jazdy diagnostickÃ―m vozidlom je nutnÃĐ ponechaÅĨ prÃstroje zbieraÅĨ dÃĄta eÅĄte 10 minÚt staticky na mieste, kde nie sÚ prekÃĄÅūky k oblohe pre lepÅĄiu koordinÃĄciu lokalizaÄnÃ―ch systÃĐmov.

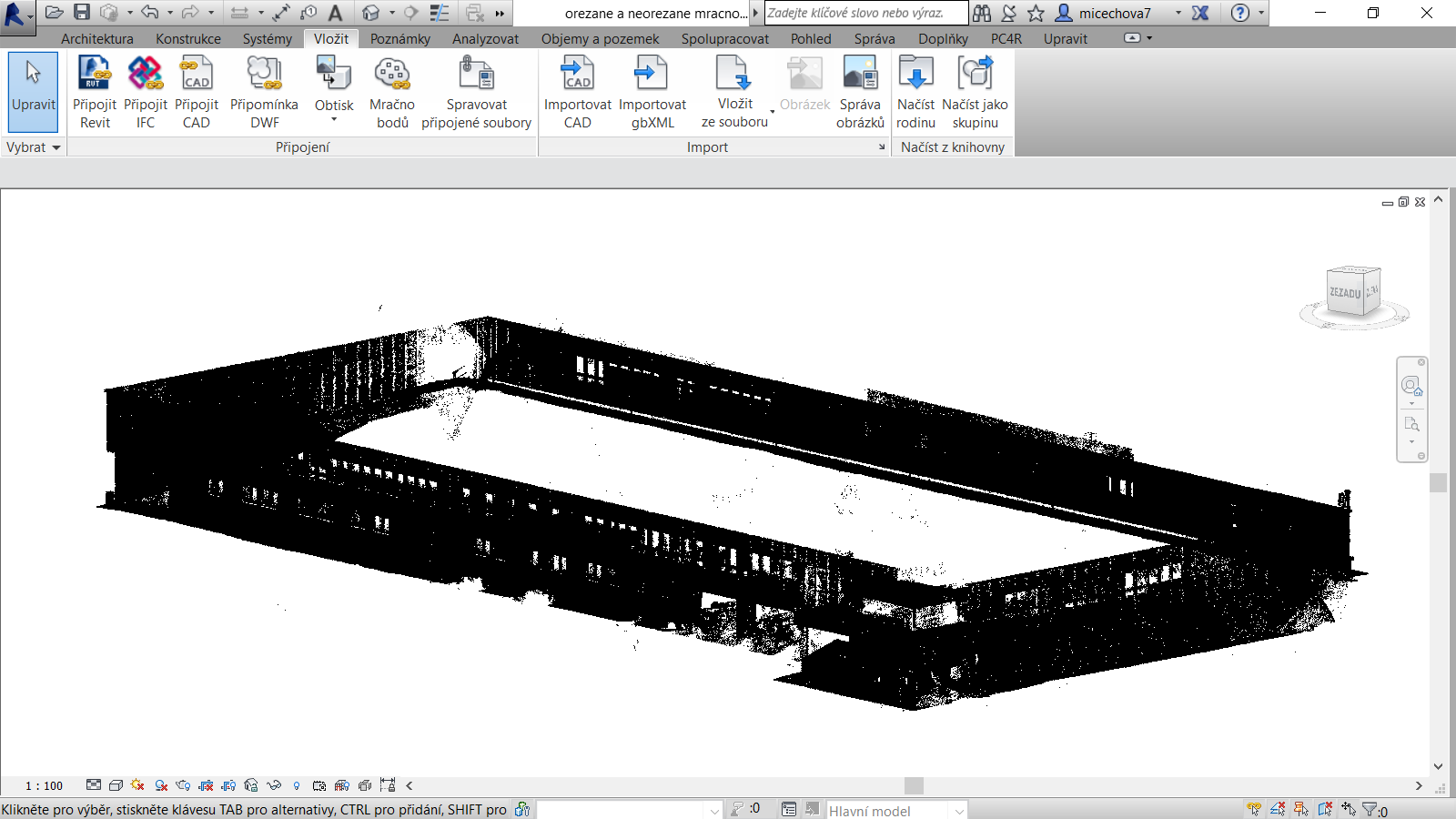
Obr. 3 Porovnanie neorezanÃĐho a orezanÃĐho mraÄna bodov
Post-processing point cloudu (Obr. 3), zabezpeÄuje zdokonalenie nameranÃ―ch dÃĄt. OdstrÃĄni sa niekoÄūko miliÃģnov bodov a tÃ―m sa mraÄno bodov stÃĄva prehÄūadnejÅĄie pre nÃĄslednÃĐ modelovanie a zÃĄroveÅ mÃĄ sÚbor aj menÅĄiu veÄūkosÅĨ, Äo sa prejavà pri modelovanà v programe jeho rÃ―chlejÅĄou odozvou na prÃkazy, ktorÃĐ sÚ programu zadÃĄvanÃĐ. Nasledoval proces modelovania stavebnÃĐho objektu v softvÃĐrovom prostredà Autodesk Revit. [5] BIM modelovanie je praktickÃĐ pre celkovÚ vÃ―stavbu a uÄūahÄuje monitoring problematickÃ―ch Äastà stavby v Äase prevÃĄdzky. NapomÃĄha sprÃĄvcom stavebnÃ―ch objektov zostavovaÅĨ finanÄnÃ― plÃĄn z hÄūadiska budÚcich vÃ―davkov na opravy a tÃ―m lepÅĄie plÃĄnovaÅĨ celkovÚ sprÃĄvu objektov. Je to dÃīleÅūitÃ― nÃĄstroj pre tzv. Life cycle assessment, kde mÃīÅūe byÅĨ nÃĄpomocnÃ― pri optimalizÃĄcià ÅūivotnÃĐho cyklu objektu pri matematickom analytickom rieÅĄenà v kombinÃĄcià s experimentÃĄlnym overenÃm fyzikÃĄlnych, mechanickÃ―ch a ÚnavovÃ―ch charakteristÃk. [6] VÃ―robcovia stavebnÃ―ch prvkov alebo technologickÃ―ch zariadenà rieÅĄia otÃĄzku, Äi, kedy a akÃ―m spÃīsobom nastÚpiÅĨ do BIM. V prÃpade vÃ―robcov to obvykle znamenÃĄ poskytnÚÅĨ portfÃģlio svojich vÃ―robkov stavebnÃ―m projektantom vo forme 3D modelov s pridruÅūenÃ―mi informÃĄciami. VznikÃĄ konkurenÄnÃĄ vÃ―hoda v zmysle, Åūe ÅĄanca zapracovania prÃĄve ich produkt bude v stavebnom projekte je vyÅĄÅĄia, pretoÅūe projektant dostane hotovÃ― model, ktorÃ― mÃīÅūe do projektu jednoducho vloÅūiÅĨ namiesto toho, aby sa obÅĨaÅūoval s jeho vytvÃĄranÃm. [7]
Skenovanie je potom vhodnÃĐ vyuÅūiÅĨ pri dokumentovanà nepravidelnÃ―ch objektov ako sÚ sochy reliÃĐfy, archeologickÃĐ nÃĄlezy pretoÅūe zachytÃĄva celÃ― objekt s zvolenou mierou detailov. Z uvedenÃ―ch ÅĄtÚdià bolo zistenÃĐ, Åūe fotogrametria a skenovanie sÚ metÃģdy, ktorÃĐ na seba skÃīr nadvÃĪzujÚ a ich kombinÃĄcia mÃīÅūe vyrieÅĄiÅĨ mnoÅūstvo problÃĐmov, ktorÃĐ sa pri pouÅūità technolÃģgià jednotlivo vyrieÅĄiÅĨ nedajÚ. [8]
NÃĄsledne sa vyuÅūili nameranÃĐ dÃĄta a zrealizovalo sa porovnanie naskenovanÃ―ch Údajov (skutoÄnÃĐho stavu) s reÃĄlnou dokumentÃĄciou. VÃ―sledkom bolo zistenie nedokonalostà v projektovej dokumentÃĄciÃ, ktorÃĐ uvÃĄdzam v nasledujÚcom Obr. 4:
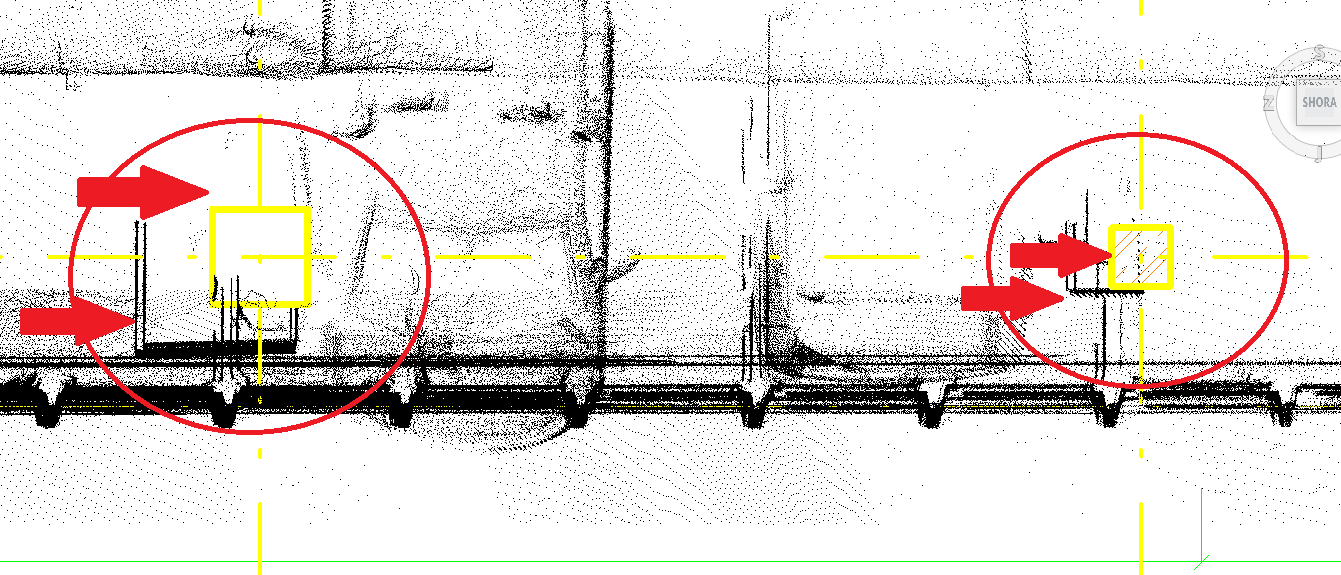

Obr. 4 Porovnanie point cloudu s projektovou dokumentÃĄciou – stÄšpy (vÄūavo), okno (vpravo)
Z uvedenÃ―ch prÃkladov je zjavnÃĐ, Åūe porovnanie projektovej dokumentÃĄcie a point cloudu mÃĄ veÄūkÃĐ uplatnenie. NaprÃklad pri kolaudÃĄcià alebo kontrole kvality v rÃĄmci kontrolnÃĐho stavebnÃĐho merania, kde je moÅūnÃĐ rÃ―chlo a jednoducho zistiÅĨ nezrovnalosti, ktorÃĐ vznikli poÄas vÃ―stavby medzi skutoÄnÃ―m stavom stavby a vÃ―kresovou dokumentÃĄciou. V nasledujÚcej kapitole sa autor venuje kompletizovaniu vnÚtornÃ―ch silnÃ―ch a slabÃ―ch strÃĄnok a vonkajÅĄÃch prÃleÅūitostà a hrozieb predstavenej problematiky a to prostrednÃctvom SWOT analÃ―zy, ktorÃĄ je vyuÅūÃvanÃĄ ako zÃĄkladnÃ― nÃĄstroj na vyhodnotenie sÚÄasnÃĐho stavu problematiky z rÃīznych hÄūadÃsk.
4 PosÚdenie procesu pomocou SWOT analÃ―zy
V rÃĄmci SWOT analÃ―zy (Tab. 1) je zhodnotenÃ― celÃ― proces spracovanÃ― v prÃspevku. SWOT analÃ―za je zÃĄkladnÃ―m nÃĄstrojom, ktorÃ― sa pouÅūÃva na vyhodnotenie sÚÄasnÃĐho stavu z rÃīznych hÄūadÃsk, a to z hÄūadiska silnÃ―ch a slabÃ―ch strÃĄnok, prÃleÅūitosti a ohrozenÃ. ZÃĄroveÅ naÄrtÃĄva moÅūnÃĐ alternatÃvy budÚceho vÃ―voja, moÅūnosti na ich vyuÅūitie, prÃpadne ich rieÅĄenie. SWOT analÃ―za je vlastne kombinÃĄciou analÃ―zy O-T a S-W. O-T analÃ―za predstavuje vonkajÅĄiu – externÚ analÃ―zu, zameriavajÚcu sa najmÃĪ na vonkajÅĄie prostredie (prÃleÅūitosti a ohrozenia). S-W analÃ―za predstavuje vnÚtornÚ – internÚ analÃ―zu, v ktorej ide o rozbor vnÚtornÃ―ch faktorov problematiky. [9]
| O – OPPORTUNITIES PRÃLEÅ―ITOSTI | T – THREATS OHROZENIA |
|
|
| S – STRENGHTS SILNÃ STRÃNKY | W – WEAKNESSES SLABÃ STRÃNKY |
|
|
NepostaÄuje iba identifikÃĄcia jednotlivÃ―ch silnÃ―ch a slabÃ―ch strÃĄnok alebo prÃleÅūitostà a hrozieb, pretoÅūe tÃ―m vznikÃĄ len zoznam poloÅūiek, ktorÃ― neobsahuje ÄalÅĄie rieÅĄenie situÃĄcie. Preto je potrebnÃĐ jednotlivÃĐ poloÅūky zoznamu rozanalyzovaÅĨ a ohodnotiÅĨ ich vplyv na proces ako celok. NajlepÅĄie prednosti sÚ takÃĐ, ktorÃĐ sÚ ÅĄpecifickÃĐ a je zloÅūitÃĐ ich urÄitÃ―m spÃīsobom napodobniÅĨ, ÄÃm v podstate vytvÃĄrajÚ konkurenÄnÚ vÃ―hodu. Pre prÃpad prÃspevku, kde bol rieÅĄenÃ― proces zÃskania, transformÃĄcie a vyuÅūitia nameranÃ―ch dÃĄt (reprezentovanÃ―ch point cloudom) v prostredà BIM je moÅūnÃĐ jednoznaÄne uviesÅĨ, Åūe v celom procese prevlÃĄdajÚ najmÃĪ pozitÃvne strÃĄnky. KritickÃĐ miesta je potrebnÃĐ eliminovaÅĨ na minimum, keÄÅūe brÃĄnia aktivitÃĄm a efektÃvnemu vÃ―konu. Pre tento prÃpad je moÅūnÃĐ slabÃĐ strÃĄnky eliminovaÅĨ procesom riadenia rizÃk, prÃpadne kontinuÃĄlnym investovanÃm do ÄūudskÃ―ch zdrojov, ktorÃĐ budÚ danÃĐ procesy realizovaÅĨ. Aj napriek prevlÃĄdajÚcim pozitÃvam nad negatÃvami, boli pri spracovanà zistenÃĐ aj urÄitÃĐ slabÃĐ strÃĄnky v rieÅĄenej oblasti a to v spojitosti naprÃklad s vyuÅūitÃm 3D mobilnÃĐho laserovÃĐho skenera na pozemnÃĐ stavby. Je potrebnÃĐ prihliadaÅĨ nato aby vÃ―ÅĄkovÃ― dosah lasera bol pre meranÃ― objekt dostaÄujÚci. Z uvedenÃĐho vyplÃ―va, Åūe vÃ―hodnejÅĄie je vyuÅūÃvaÅĨ mobilnÃ― skener pri mapovanà lÃniovÃ―ch stavieb, kde dokonca ani nie je nutnÃĐ obmedziÅĨ premÃĄvku tzn. Åūe meranie je moÅūnÃĐ vykonÃĄvaÅĨ za plnej prevÃĄdzky komunikÃĄcie. Pri vyhotovovanà informaÄnÃĐho modelu budovy (Obr. 5) je dÃīleÅūitÃĐ dokonale poznaÅĨ softvÃĐr, v ktorom informaÄnÃ― model bude vytvorenÃ―, aby bolo moÅūnÃĐ vyuÅūiÅĨ vÅĄetky vÃ―hody, ktorÃĐ softvÃĐr ponÚka a tÃ―m model posunÚÅĨ na vyÅĄÅĄiu ÚroveÅ, priÄom mÃīÅūe byÅĨ zabezpeÄenÃĐ priaznivÃĐ zachovanie energià a prostredia a podpora uÅūÃvateÄūov k produktÃvnej prÃĄci poÄas celej Åūivotnosti budovy.
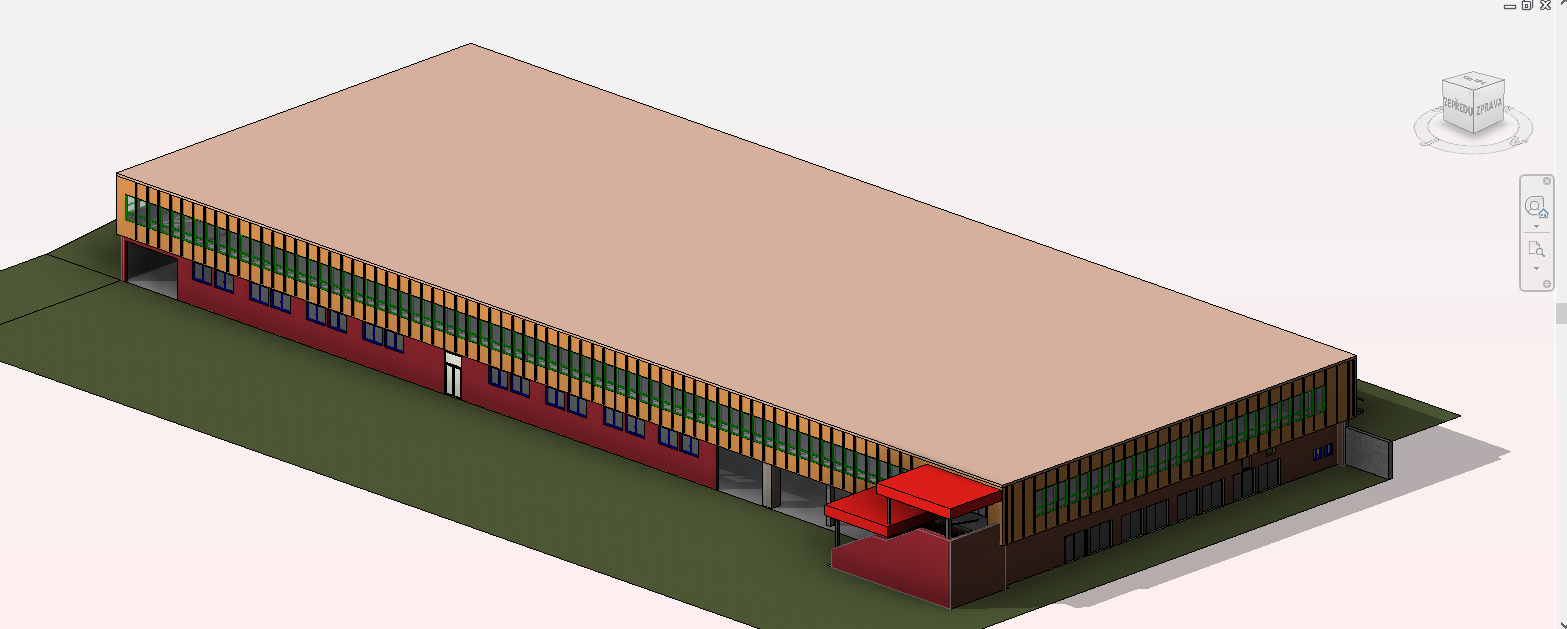
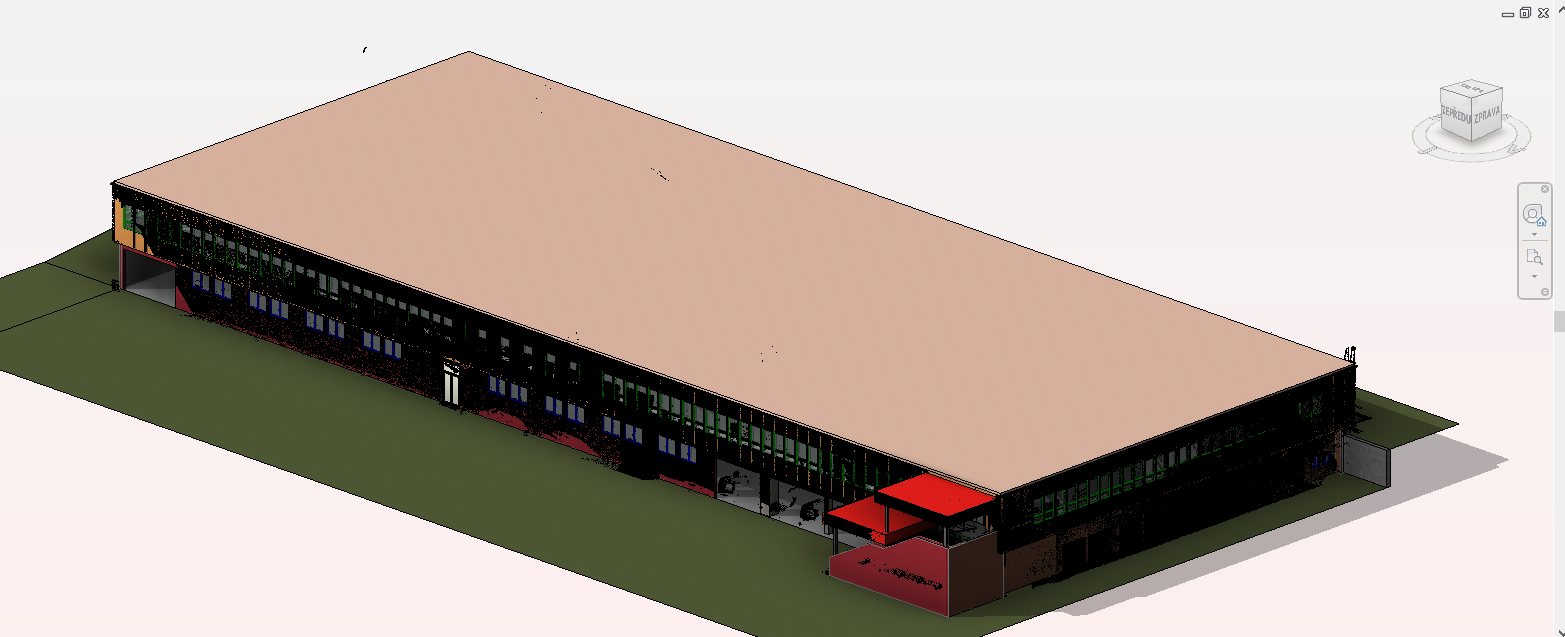
Obr. 5 PohÄūad na vÃ―slednÃ― BIM model bez mraÄna bodov (vÄūavo), s mraÄnom bodov (vpravo)
5 ZÃĄver
PrÃspevok prehÄūadnou formou poukazuje na vÃ―hody a nevÃ―hody inovatÃvnych technolÃģgià a ich vyuÅūitia v prostredà stavebnÃĐho odvetvia, a to s orientÃĄciou na princÃpy BIM prepojenÃĐ s moÅūnosÅĨami zÃskavania vstupnÃ―ch dÃĄt prostrednÃctvom 3D mapovania objektov.
PrÃspevok je venovanÃ― problematike BIM (Building Information Modeling) ako revoluÄnÃĐho spÃīsobu realizÃĄcie vybranÃ―ch Úkonov v rÃĄmci prÃpravy, vÃ―stavby a sprÃĄve budov (Facility managementu) a terestriÃĄlnemu laserovÃĐmu skenovaniu, ktorÃĐ je vÃ―nimoÄnÃĐ svojou rÃ―chlosÅĨou, presnosÅĨou a mnoÅūstvom zbieranÃ―ch dÃĄt. Je to vÅĄeobecne vyuÅūÃvanÃĄ metÃģda zberu dÃĄt, ktorÃĄ je rÃ―chla a dÃĄta mÃīÅūu byÅĨ veÄūmi podrobnÃĐ.
SÚbeÅūne sa spracoval strategickÃ― prehÄūad SWOT, ktorÃ― poukazuje na niekoÄūko zaujÃmavÃ―ch faktov, Äalej je poukÃĄzanÃĐ na ostatnÃĐ moÅūnosti vyuÅūitia laserovÃĐho skenovania a informaÄnÃĐho modelovania budov. Point cloud poslÚÅūil na porovnanie existujÚcej projektovej dokumentÃĄcie, teda na odhalenie moÅūnÃ―ch odchÃ―lok skutoÄnÃĐho (reÃĄlneho) stavu budov od vÃ―kresovej dokumentÃĄcie.
Medzi zaujÃmavÃĐ zistenia je moÅūnÃĐ zaradiÅĨ aj skutoÄnosÅĨ, Åūe slovenskom trhu existuje „diera“ v danom odvetvà spojenom s vyuÅūitÃm BIM a 3D skenovania objektov. StavebnÃĐ firmy pristupujÚ aj napriek jestvujÚcim benefitom k vyuÅūitiu danÃ―ch prÃstupov skepticky a odkladajÚ aktivity spojenÃĐ s ich postupnÃ―m zavÃĄdzanÃm do svojho manaÅūÃĐrskeho prostredia. A to aj napriek skutoÄnosti, Åūe by si tÃ―m zabezpeÄili vyÅĄÅĄiu mieru konkurencieschopnosti voÄi ostatnÃ―m subjektom na trhu.
ZÃĄverom je moÅūnÃĐ uviesÅĨ, Åūe vÄaka stÃĄle aktuÃĄlnejÅĄÃm a silnejÚcim poÅūiadavkÃĄm na efektÃvnosÅĨ a komplexnosÅĨ realizÃĄcie vybranÃ―ch procesov riadenia stavebnej zÃĄkazky, bude v krÃĄtkodobom horizonte nevyhnutne kladenÃ― stÃĄle vÃĪÄÅĄÃ dÃīraz na vyuÅūÃvanie nÃĄstrojov a princÃpov budovanÃ―ch na myÅĄlienke informaÄnÃĐho modelovania budov (BIM). Pri sprÃĄvnej aplikÃĄcii nÃĄstrojov urÄenÃ―ch na kreovanie informaÄnÃĐho modelu stavby je moÅūnÃĐ docieliÅĨ jednoznaÄnÃĐ procesnÃĐ a ekonomickÃĐ benefity, ktorÃĐ umoÅūnia nielen zÃskavaÅĨ komplexnÃĐ dÃĄta o predmetnej stavbe, ale taktieÅū pristupovaÅĨ k riadeniu procesu sprÃĄvy objektov vo vÅĄetkÃ―ch fÃĄzach ich ÅūivotnÃĐho cyklu. TaktieÅū je moÅūnÃĐ uviesÅĨ, Åūe danÃĐ prÃnosy prevyÅĄujÚ v koneÄnom dÃīsledku hlavnÚ nevÃ―hodu BIM prÃstupov, ktorÃ―m je vyÅĄÅĄia poÄiatoÄnÃĄ investÃcia spojenÃĄ so zabezpeÄenÃm samotnÃ―ch produktov BIM (licencià a IKT vybavenia), ako aj s nutnosÅĨou akceptovaÅĨ zvÃ―ÅĄenÃĐ nÃĄklady urÄenÃĐ na preÅĄkolenie personÃĄlu urÄenÃĐho na prÃĄcu s danÃ―mi aplikÃĄciami.
PoÄakovanie
Tento prÃspevok bol vypracovanÃ― s podporou projektu „VÃ―skumnÃĐ centrum Å―ilinskej univerzity – ITMS 26220220183“.
PouÅūitÃĐ zdroje
- NAVRÃTIL, R. Technologie skenovanà ve 3D [online, prÃstupnÃĐ dÅa 23. 5. 2017].
- VAÅÃK, P. 2016. BIM Pilot # 01:mraÄna bodÅŊ nejsou model! [online, prÃstupnÃĐ dÅa 2. 10. 2018]. DostupnÃĐ na internete: https://www.bimpilot.cz/single-post/2016/05/03/BIM-Pilot-01-mra%C4%8Dna-bod%C5%AF-nejsou-model
- Baudelet, M. a kol. 2014. Laser Spectroscopy for Sensing: undamentals, Techniques and Applications. Elsevier.: Cambridge. 2014. ISBN 978-0-85709-273-1
- TAO, C. V. – Li, J. 2007. Advances in mobile mapping technology. Vol 4. International Society for Photogrammetry and Remote Sensing book series. Taylor & Francis Group. London. 2007. ISBN 0-415-42723-1
2008. 187 s. ISBN 978-80-01-04141-3 - ZÃVODNÃK, P. 2011. Scan to BIM – jednoduchÅĄÅĄÃ pÅÃstup k vÃ―stupÅŊm z laser-scanningu [online, prÃstupnÃĐ 23. 5. 2018]
- MIKOLAJ, J. – SCHLOSSER, F. – REMEK, L. – CHYTCAKOVA, A. 2015. Asphalt Concrete Mixtures: Requirements with regard to Life Cycle Assessment. In Advances in Materials Science and Engineering. ISSN 1687-8434, 2015, vol. 2015, Article ID 567238, 7 pages.
- BIM ASOCIÃCIA SLOVENSKO, 2016. EfektÃvny proces kontroly BIM modelu s vyuÅūitÃm laserovÃĐho skenovania [online, prÃstupnÃĐ dÅa 24. 9. 2018]
- Å TRONER, M. – POSPÃÅ IL, J. 2008. TerestrickÃĐ skenovacà systÃĐmy. 1. vyd. Praha: ÄeskÃĐ vysokÃĐ uÄenà v Praze.
- HANZELKOVÃ, A. – KEÅKOVSKÃ, M. 2017. StrategickÃĐ ÅÃzenÃ, 2017. 256 s. ISBN 9788074006371.
The paper is focused on the evaluation of the possibilities using the diagnosis of building objects and outcomes of the mobile 3D scanning process of existing objects and their software transformation using Building Information Modeling (BIM). Emphasis is placed on the creation of building object based on the point cloud determined by 3D mobile mapping. The main objective was to process measured data from mobile mapping, import data into the Autodesk Revit program and create a BIM model. A partial objective was to compare the resulting object originating from the point cloud to the existing project documentation. Conclusion of the paper is evaluating the process through SWOT analysis.