NastavenĂ analogovĂœch vstupĆŻ

PodrobnĂœ popis nastavenĂ analogovĂœch vstupĆŻ a vĂœstupĆŻ a vĂœznamy vĆĄech parametrĆŻ jsou v nĂĄpovÄdÄ k Merbon IDE, ÄĂĄst RegulĂĄtor (PLC) – Transformace a konfigurace analogovĂœch vstupĆŻ. Zde si jen shrneme postup a ÄastĂ© chyby.
VĂœbÄr typu signĂĄlu v IDE
Podle typu vstupnĂho signĂĄlu vybereme pro kaĆŸdĂœ vstup jeho typ:
- napÄtĂ – pro aktivnĂ Äidla s vĂœstupem 0 … 10 V,
- proud – pro aktivnĂ Äidla s vĂœstupem 0(4) … 20 mA, vstup musĂ tento typ signĂĄlu podporovat a obvykle je nutnĂ© u vstupu pĆepnout DIP pĆepĂnaÄ nebo aktivovat jumper, ÄĂmĆŸ se pĆipne odpor, na kterĂ©m se mÄĆĂ Ășbytek napÄtĂ pro proud, kterĂœ Äidlo poskytuje,
- odpor – pro pasivnĂ odporovĂĄ Äidla teploty, rozsah 0 … 1 600 Ohm vyuĆŸĂvĂĄ vÄtĆĄĂ rozliĆĄenĂ A/D pĆevodnĂku, zatĂmco rozsah 0 … 5 000 Ohm poskytuje vÄtĆĄĂ rozsah mÄĆenĂ (do 350 °C mĂsto do cca 100 °C); oba rozsahy se do PLC pĆenĂĄĆĄejĂ v podobÄ „odpor (Ohm) * 10“. Pro bÄĆŸnĂ© pouĆŸitĂ je vhodnĂœ rozsah 0 … 5 000 Ohm.
DalĆĄĂ rozsah „Teplota Pt1000 (−50 … 150 °C)“ znamenĂĄ, ĆŸe linearizace (pĆevod odporu na teplotu) probĂhĂĄ jiĆŸ v I/O modulu a po sbÄrnici je do PLC pĆenĂĄĆĄena teplota * 100 (°C) – viz modbusovĂĄ tabulka napĆ. modulu RCIO. Tuto moĆŸnost mĆŻĆŸeme vyuĆŸĂt, pokud I/O modul pouĆŸĂvĂĄme pro sbÄr dat v cizĂch systĂ©mech, kterĂ© linearizaci v PLC neumoĆŸĆujĂ – hodnotu ze sbÄrnice staÄĂ vydÄlit 100. V Merbon IDE je ale vĂœhodnÄjĆĄĂ linearizovat aĆŸ v PLC, protoĆŸe tam mĆŻĆŸeme zavĂ©st kompenzaci dĂ©lky vedenĂ a podobnÄ.
ÄastĂĄ chyba: Modul nastaven na rozsah „Teplota Pt1000 (−50 … 150 °C)“, v IDE je dĂĄle nastavena transformace Resistance to temperature… Hodnota, kterĂĄ teplotu jiĆŸ numericky pĆedstavuje, je zpracovĂĄna linarizaÄnĂ kĆivkou „odpor → teplota“ podruhĂ© a tedy poskytuje nesmyslnĂœ vĂœsledek, −247 °C.
NastavenĂ transformace a koeficientĆŻ pro pasivnĂ Äidlo teploty
Koeficienty Pre_K a Pre_Q jsou pouĆŸity pĆed transformacĂ, Post_K a Post_Q po transformaci:
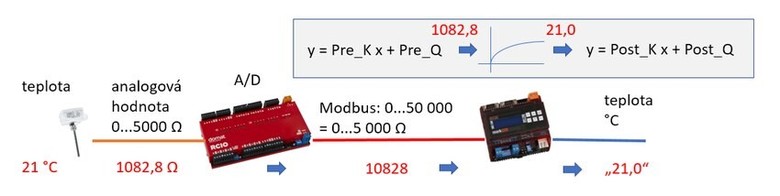
Transformace Pre… se pouĆŸĂvĂĄ jednak pro pĆepoÄet ModbusovĂ© hodnoty na odpor, jednak ji lze vyuĆŸĂt pro kompenzaci odporu vedenĂ mezi Äidlem a I/O modulem. Transformace Post… se pouĆŸĂvĂĄ pro kompenzaci chyby mÄĆenĂ samotnĂ©ho Äidla a zadĂĄvĂĄ se v K.
Tip pro diagnostiku: Hodnotu, kterĂĄ vstupuje po sbÄrnici Modbus do PLC, lze pĆeÄĂst v mĂłdu Debug ve jmennĂ©m prostoru hw_hidden:
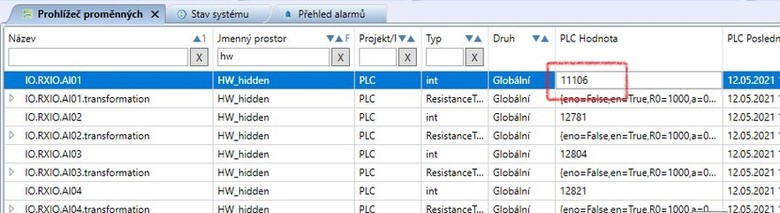
Pro AI01 je to zde 1110,6 Ω, coĆŸ je korektnĂ mÄĆenĂĄ hodnota (odpovĂdĂĄ teplotÄ 28,4 °C). Podle tĂ©to hodnoty poznĂĄme, zda problĂ©m je v nastavenĂ I/O modulu, nebo v kĂłdu v PLC.
SprĂĄvnĂ© nastavenĂ pro pasivnĂ Äidlo Pt1000 tedy vypadĂĄ takto:
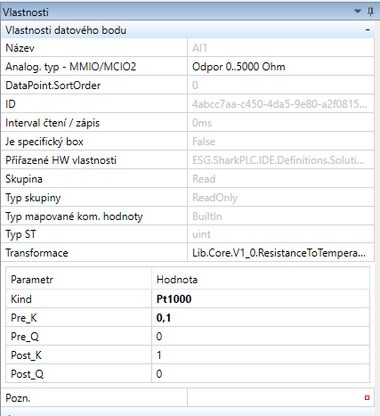
Druh transformace, zde Pt1000, vybĂrĂĄ linearizaÄnĂ kĆivku – ta je specifickĂĄ pro kaĆŸdĂœ typ Äidla (Pt100, Pt1000, Ni1000-5000 atd.).
ÄastĂĄ chyba: Koeficient Pre_K je nastaven na hodnotu 1. MusĂ bĂœt 0.1, protoĆŸe hodnota odporu se na Modbusu pĆenĂĄĆĄĂ „Ohm * 10“, aby bylo zachovĂĄno rozumnĂ© rozliĆĄenĂ:
NastavenĂ v I/O modulu
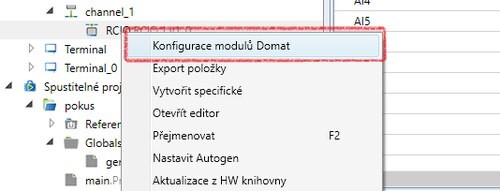
DĂĄle je nutnĂ© nakonfigurovat rozsahy mÄĆenĂ v I/O modulu. To lze provĂ©st buÄ v programu ModComTool uĆŸ pĆi adresovĂĄnĂ a oĆŸivovĂĄnĂ I/O modulĆŻ, nebo – vĂœhodnÄji – v Merbon IDE pravĂœm kliknutĂm na I/O modul a vĂœbÄrem Konfigurace modulĆŻ Domat.
Merbon IDE postupuje pĆi konfiguraci takto:
- PĆepne PLC do mĂłdu oĆŸivovĂĄnĂ (v nÄm je runtime zastaven a PLC funguje jako pĆevodnĂk mezi sĂ©riovou linkou a PC, takĆŸe IDE mĆŻĆŸe do modulu vyslat pĆĂsluĆĄnĂ© konfiguraÄnĂ pĆĂkazy).
- NĂĄslednÄ zapisuje do registrĆŻ poĆŸadovanĂ© mÄĆicĂ rozsahy a toto nastavenĂ uloĆŸĂ do EEPROM a restartuje I/O modul, aby se zmÄny projevily.
- Nakonec pĆepne PLC zpÄt do bÄĆŸnĂ©ho mĂłdu.
NynĂ tedy I/O modul posĂlĂĄ na sbÄrnici
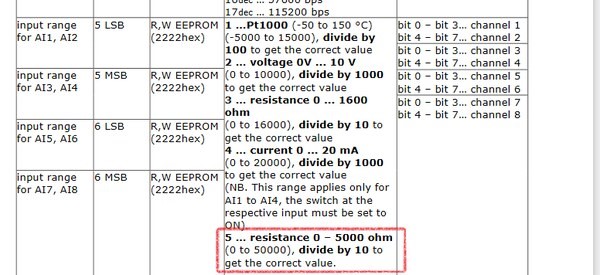
- u pasivnĂho Äidla hodnotu mÄĆenĂ©ho odporu v ohmech vynĂĄsobenou deseti (0 … 50 000 = 0 … 5 000 Ω),
- u napÄtĂ hodnotu v mV (0 … 10 000 mV),
- u proudu hodnotu v uA (0 … 20 000 = 0 … 20 mA).
Tyto rozsahy jsou uvedeny v nĂĄpovÄdÄ Merbon IDE pro jednotlivĂ© I/O moduly a v ModbusovĂ© mapÄ pĆĂsluĆĄnĂ©ho modulu.
ÄastĂĄ chyba: Toto nastavenĂ modulu nenĂ provedeno, modul pak mÄĆĂ s vĂœchozĂm nebo starĂœm rozsahem vstupu a vypoÄtenĂ© hodnoty v PLC pak nedĂĄvajĂ smysl.
NastavenĂ pro Äidlo s proudovĂœm vĂœstupem
Asi nejlepĆĄĂ transformacĂ pro rozsah 0(4) … 20 mA je lineĂĄrnĂ dvoubodovĂĄ transformace.
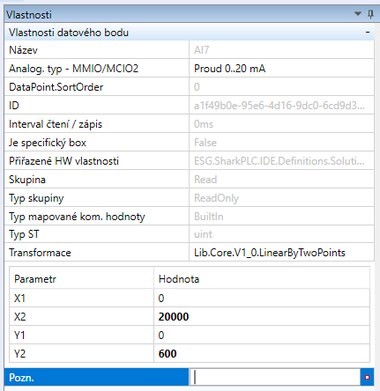
Na obrĂĄzku je pĆĂklad nastavenĂ pro Äidlo tlaku 0 … 20 mA = 0 … 600 kPa. Na prvnĂ pohled je vidÄt vstupnĂ i vĂœstupnĂ rozsah. U Äidla 4 … 20 mA = 0 … 600 kPa by se jen zmÄnila hodnota X1 = 4 000.
NastavenĂ pro Äidlo s napÄĆ„ovĂœm vĂœstupem
PodobnÄ jako v pĆedchozĂm pĆĂpadÄ, lze samozĆejmÄ pouĆŸĂt i prostou lineĂĄrnĂ transformaci Kx+Q:
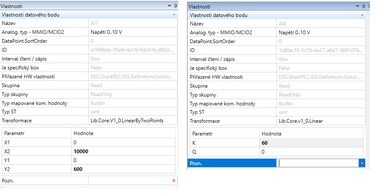
ObÄ transformace poskytujĂ stejnĂ© vĂœsledky, koeficient K = 60 = 0,001 * 600 (pĆepoÄet mV na kPa) je ale na prvnĂ pohled mĂ©nÄ srozumitelnĂœ neĆŸ dvoubodovĂĄ transformace (X1 … Y2) vlevo.
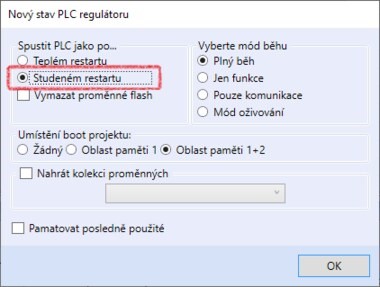
StudenĂœ restart po nahrĂĄnĂ!
VeĆĄkerĂ© hodnoty tĂœkajĂcĂ se nastavenĂ vstupĆŻ, transformacĂ a jejich koeficientĆŻ se uplatnĂ aĆŸ po nahrĂĄnĂ a studenĂ©m restartu programu.
V prĆŻbÄhu oĆŸivovĂĄnĂ nenĂ studenĂœ restart (pĆi nÄmĆŸ se ztratĂ aktuĂĄlnĂ hodnoty z runtime a vĆĄechny promÄnnĂ© se nastavĂ na vĂœchozĂ hodnoty ze zdrojovĂ©ho kĂłdu) problĂ©mem. PozdÄji pĆi provozu ale chceme aktuĂĄlnĂ hodnoty zachovat, tedy studenĂ©mu restartu se vyhnout. Pak lze postupovat takto:
- typ transformace u vstupu nastavit na Identity,
- nahrĂĄt program a provĂ©st teplĂœ restart,
- typ transformace nastavit opÄt na Resistance to temperature (nebo jinou poĆŸadovanou transformaci),
- nahrĂĄt program a provĂ©st teplĂœ restart.
S transformacĂ Identity se totiĆŸ pĆi kompilaci smaĆŸou pomocnĂ© promÄnnĂ© s typem linearizace, koeficienty atd. Jejich opÄtovnĂ© zaloĆŸenĂ uĆŸ aplikuje novĂ© hodnoty. Kdybychom jen zmÄnili napĆ. typ linearizaÄnĂ kĆivky nebo hodnoty Pre_K, Pre_Q, X1, X2 atd., transformace by vĆŸdy zĆŻstala v kĂłdu a po pĆehrĂĄnĂ programu a teplĂ©m restartu by se u nĂ pouĆŸily aktuĂĄlnĂ (starĂ©) hodnoty v PLC.
ÄastĂĄ chyba: Po zmÄnÄ koeficientĆŻ transformace nenĂ u PLC proveden studenĂœ restart. PlatĂ tedy stĂĄle transformace starĂĄ a PLC zobrazuje nesmyslnĂ© hodnoty.
Domat Control System s.r.o. patĆĂ k evropskĂ© ĆĄpiÄce dodavatelĆŻ ĆĂdicĂch systĂ©mĆŻ a regulacĂ pro inteligentnĂ budovy, prĆŻmysl a energetiku. CĂlem tĂ©to ryze ÄeskĂ© spoleÄnosti je vyvĂjet, vyrĂĄbÄt a dodĂĄvat ĆĂdĂcĂ systĂ©my v mezinĂĄrodnĂm mÄĆĂtku.