NejáastájéÀûÙ chyby regulace otopnû§ch systûˋmé₤ a éeéÀenûÙ samonastavujûÙcûÙmi se regulûÀtory
PID regulûÀtor je sloéƒenû§ z proporcionûÀlnûÙ, integraánûÙ a derivaánûÙ áûÀsti. Péi nevhodná nastavenû§ch parametrech mé₤éƒe dochûÀzet k neéƒûÀdoucûÙm jevé₤m v otopnû§ch systûˋmech. Jejich potlaáenûÙ umoéƒéuje funkce samonastavenûÙ.
ûvod
álûÀnek se zabû§vûÀ problematikou regulace otopnû§ch systûˋmé₤. V dneéÀnûÙch otopnû§ch systûˋmech tvoéûÙ regulace nedûÙlnou, ale v praxi nezéûÙdka kdy opomûÙjenou, souáûÀst. Pro spojitûˋ éûÙzenûÙ, kterûˋmu se álûÀnek vánuje, se nejáastáji pouéƒûÙvûÀ PID regulûÀtor (jmûˋno odrûÀéƒûÙ fakt, éƒe je sloéƒenû§ z proporcionûÀlnûÙ, integraánûÙ a derivaánûÙ áûÀsti). PID regulûÀtor mûÀ nákolik parametré₤, kterûˋ uráujûÙ jeho chovûÀnûÙ. Péi nevhodná nastavenû§ch parametrech mé₤éƒe dochûÀzet k ré₤znû§m neéƒûÀdoucûÙm jevé₤m jako jsou oscilace, péekmity, nebo nedotûÀpánûÙ. Dé₤sledkem pak mohou bû§t hydraulickûˋ problûˋmy v otopnûˋ soustavá, diskomfort, péûÙpadná snûÙéƒenûÙ éƒivotnosti smáéÀovacûÙch ventilé₤. Bohuéƒel, v praxi nenûÙ áasto vhodnûˋmu nastavenûÙ parametré₤ vánovûÀna patéiánûÀ pozornost a dochûÀzûÙ ke zmûÙnánû§m neéƒûÀdoucûÙm jevé₤m. V álûÀnku bude péedstaven koncept samonastavujûÙcûÙho se regulûÀtoru – RoboPID, kterû§ vznikl v rûÀmci spoluprûÀce UniverzitnûÙho centra energeticky efektivnûÙch budov áVUT a firmy Energocentrum Plus, s.r.o.
Regulace otopnû§ch systûˋmé₤
Pro regulace otopnû§ch systûˋmé₤ vyuéƒûÙvûÀme spojitûˋ PID regulûÀtory. ExistujûÙ véÀak i jinûˋ regulace, napéûÙklad ON/OFF regulûÀtor, kterû§ zapûÙnûÀ a vypûÙnûÀ aktuûÀtor a v soustavá tak dochûÀzûÙ k oscilaci éûÙzenûˋ veliáiny. ON/OFF regulace s hysterezûÙ se vyuéƒûÙvûÀ napéûÙklad pro elektrickû§ ohéev TUV. PID regulûÀtor byl poprvûˋ vyuéƒit v roce 1920 pro automatickûˋ kormidlovûÀnûÙ lodûÙ. Potûˋ byla PID regulace aplikovûÀna na automatickûˋ éûÙzenûÙ procesé₤ v pré₤myslu, kde byl regulûÀtor éeéÀen pneumaticky a aéƒ nûÀsledná elektronicky. Dnes se PID regulûÀtory pouéƒûÙvajûÙ v áûÙslicovûˋ podobá.
JednûÙm z û¤kolé₤ péi pouéƒitûÙ PID regulûÀtoru je nastavenûÙ jeho parametré₤, kterûˋ lze provûˋst pomocûÙ ré₤znû§ch metod, napéûÙklad Ziegler-Nichols [2], LiptûÀk [3], Witt-Waggoner [3], Haalman [4] a daléÀûÙ. NastavenûÙ parametré₤ regulûÀtoru tak, aby pracoval sprûÀvná, mûÀ svûÀ specifika. éeéÀenûÙm nastavenûÙ parametré₤ regulûÀtoru mé₤éƒe bû§t i samonastavujûÙcûÙ regulûÀtor. SamonastavujûÙcûÙ se regulûÀtor mûÀ uráitûˋ vû§chozûÙ naladánûÙ, kterûˋ mé₤éƒe zpé₤sobovat nedotûÀpánûÙ, oscilace soustavy a jinûˋ neéƒûÀdoucûÙ jevy. Postupnû§mi automatickû§mi û¤pravami se regulûÀtor péeladûÙ tak, aby k támto neéƒûÀdoucûÙm jevé₤m nedochûÀzelo.
Diagnostika regulaánûÙch smyáek
Pro hodnocenûÙ kvality regulace existujûÙ éada kritûˋriûÙ. Komplexná se problematice hodnocenûÙ kvality vánuje disertaánûÙ prûÀce [1]. V tomto álûÀnku se omezûÙme pouze na vû§áet vybranû§ch kritûˋriûÙ, kterûÀ byla implementovûÀna a vyhodnocena v rûÀmci projektu RoboPID:
- Odchylka od poéƒadovanûˋ hodnoty
Toto kritûˋrium integruje rozdûÙl mezi poéƒadovanou a skuteánou hodnotou vû§stupu regulûÀtoru - RegulaánûÙ chyba v ustûÀlenûˋm stavu
Toto kritûˋrium poáûÙtûÀ minimûÀlnûÙ, maximûÀlnûÙ a pré₤márnou odchylku poéƒadovanûˋ a skuteánûˋ hodnoty v ustûÀlenûˋm stavu. - Poáet oscilacûÙ
Toto kritûˋrium poáûÙtûÀ poáet pré₤chodé₤ regulaánûÙ odchylky nulou. Pro zapoáûÙtûÀnûÙ pré₤chodu je téeba aby se regulaánûÙ odchylka v absolutnûÙ hodnotá péekroáila zadanou minimûÀlnûÙ hodnotu. - Péekmit poéƒadovanûˋ hodnoty
Toto kritûˋrium analyzuje skokovûˋ zmány poéƒadovanûˋ hodnoty. Péi péekroáenûÙ zadanûˋ hranice se poáûÙtûÀ procentuûÀlnûÙ péekmitnutûÙ skuteánûˋ hodnoty od poéƒadovanûˋ. - Analû§za rozsahu vstupu
Toto kritûˋrium analyzuje rozdûÙl mezi maximûÀlnûÙ a minimûÀlnûÙ hodnotou vstupu regulûÀtoru na plovoucûÙm okná.
Péi pouéƒitûÙ vhodnû§ch algoritmé₤ je moéƒnûˋ diagnostikovat chybná nastavenou regulaci na zûÀkladá máéenû§ch dat. Je téeba zajistit dostateáná hustou periodu vzorkovûÀnûÙ máéenû§ch dat. V dneéÀnûÙch systûˋmech se setkûÀvûÀme typicky se vzorkovûÀnûÙm 5 minut, ale nenûÙ vû§jimkou ani vzorkovûÀnûÙ s hodinovû§m krokem. Pro diagnostiku regulace je ideûÀlnûÙ vzorkovûÀnûÙ v éûÀdu max. jednotek sekund, aby byly postihnuty zkoumanûˋ jevy (viz Nyquisté₤v–Shannoné₤v vzorkovacûÙ teorûˋm). Nicmûˋná nákterûˋ neéƒûÀdoucûÙ jevy lze detekovat i na zûÀkladá dat s mûˋná hustû§m vzorkovûÀnûÙm.
NûÙéƒe jsou komentovanûˋ ukûÀzky vybranû§ch detekovanû§ch regulaánûÙch problûˋmé₤. Ve véÀech péûÙpadech je po celou dobu v chodu obáhovûˋ áerpadlo, tudûÙéƒ nenûÙ v grafech uvedeno.
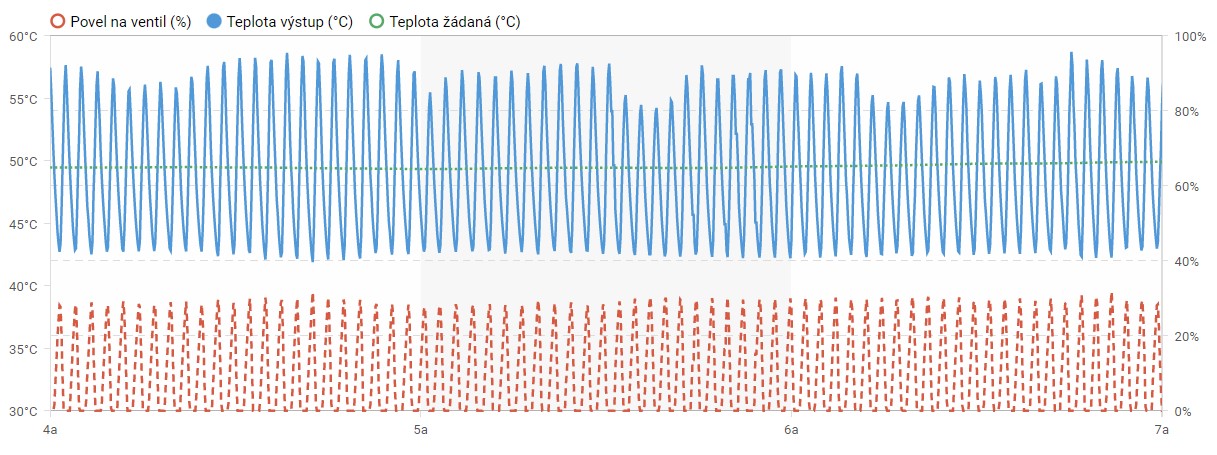
Obr. 1 PéûÙklad nadmárnû§ch oscilacûÙ vlivem chybná nastavenûˋho PID regulûÀtoru. Teplota otopnûˋ vody se mánûÙ v rozsahu 42 ô¯C aéƒ 58 ô¯C, a to báhem nákolika minut, a nedochûÀzûÙ k ustûÀlenûÙ soustavy.
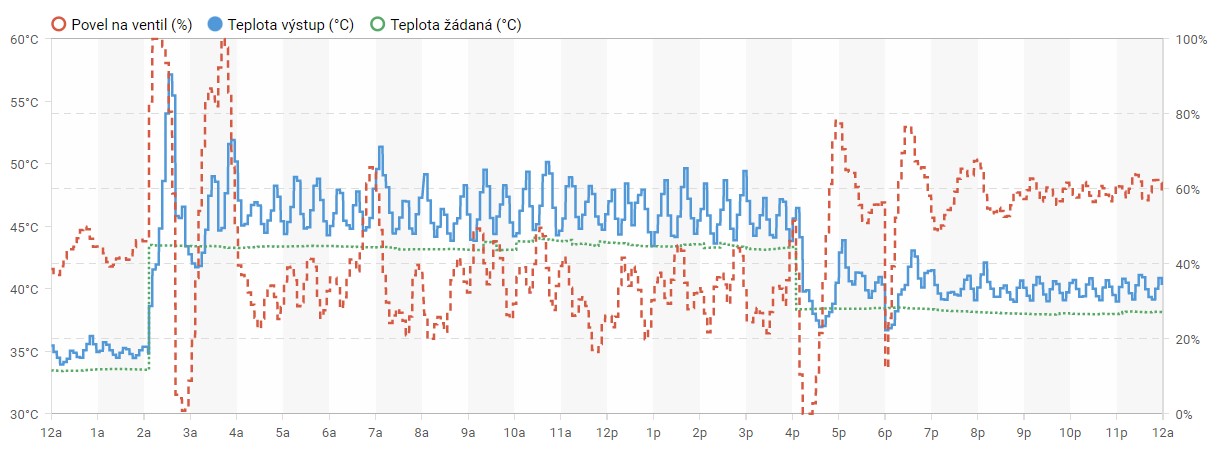
Obr. 2 PéûÙklad vû§raznûˋho péekmitu, kdy po druhûˋ rannûÙ hodiná dochûÀzûÙ ke skokovûˋ zmáná poéƒadovanûˋ teploty otopnûˋ vody z 33 ô¯C na 43 ô¯C. Na to regulace reaguje û¤plnû§m otevéenûÙm ventilu, coéƒ mûÀ za nûÀsledek krûÀtkodobû§ nûÀré₤st teploty otopnûˋ vody aéƒ na 58 ô¯C, tj. o 15 ô¯C vûÙce neéƒ je poéƒadovûÀno. Opát se jednûÀ o chybu regulace.
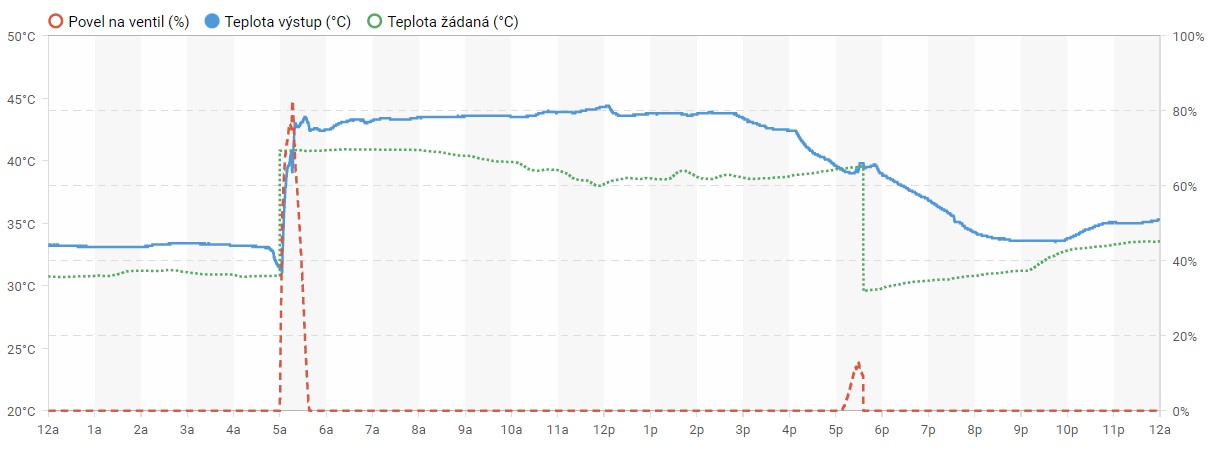
Obr. 3 PéûÙklad vû§raznûˋho nedotûÀpánûÙ otopnûˋho okruhu, kdy od pûÀtûˋ rannûÙ hodiny nenûÙ dosaéƒeno poéƒadovanûˋ hodnoty. V dobá nedotûÀpánûÙ ventil reguluje pouze v pûÀsmu 0 aéƒ 40 %, tudûÙéƒ se jednûÀ o chybu regulace.
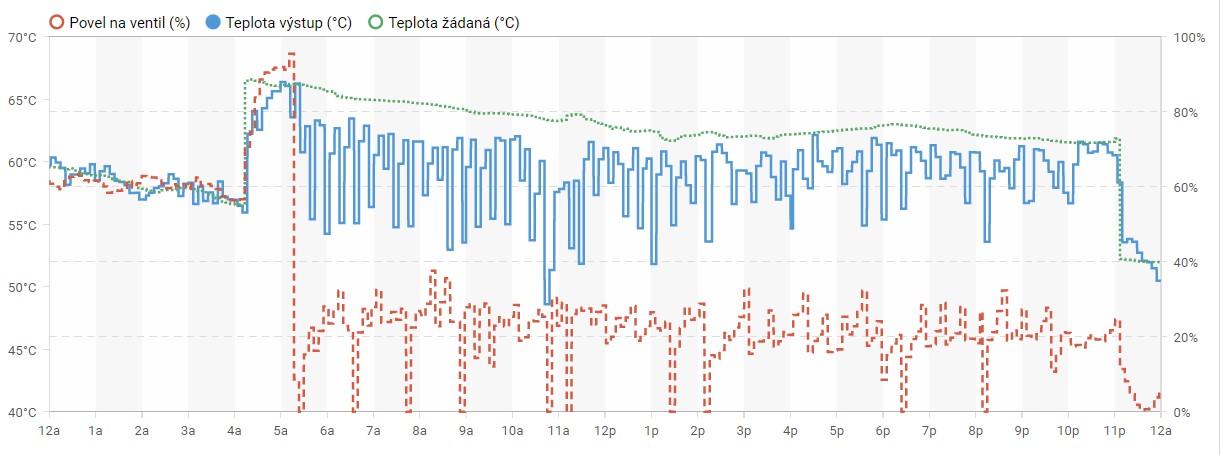
Obr. 4 PéûÙklad systematickûˋho péetûÀpánûÙ otopnûˋho okruhu. V tomto péûÙpadá se ale nejednûÀ o chybu regulace, jelikoéƒ je ventil vátéÀinu áasu uzavéen. TudûÙéƒ lze usuzovat na mechanickou poruchu smáéÀovacûÙho ventilu.
ZajûÙmavû§m vedlejéÀûÙm efektem implementovanû§ch pravidel je moéƒnost detekovûÀnûÙ vû§borná fungujûÙcûÙ regulaánûÙch smyáek. NûÙéƒe je uveden ukûÀzkovû§ péûÙklad toho, jak takûˋ mé₤éƒe regulace teploty otopnûˋ vody vypadat.

Obr. 5 PéûÙklad velmi dobée naladánûˋ regulace. Teplota otopnûˋ vody sleduje poéƒadovanou teplotu s odchylkou v éûÀdu desetin ô¯C a s minimûÀlnûÙm péekmitem a zpoéƒdánûÙm po zmáná poéƒadovanûˋ hodnoty.
V pré₤báhu éeéÀenûÙ bylo analyzovûÀno 538 otopnû§ch okruhé₤, coéƒ zahrnuje 2 501 unikûÀtnûÙch datovû§ch bodé₤. DûÙky vzorkovûÀnûÙ na û¤rovni vteéin bylo uloéƒeno a analyzovûÀno enormnûÙ mnoéƒstvûÙ zûÀznamé₤, konkrûˋtná pées 3 miliardy unikûÀtnûÙch zûÀznamé₤ (tj. pûÀr áasovûÀ znûÀmka – hodnota). Ke zpracovûÀnûÙ dat byl pouéƒit systûˋm Mervis SCADA a analytickûÀ platforma SkySpark, dûÙky kterûˋ byl moéƒnû§ komplexnûÙ pohled na celûˋ portfolio stovek otopnû§ch okruhé₤.
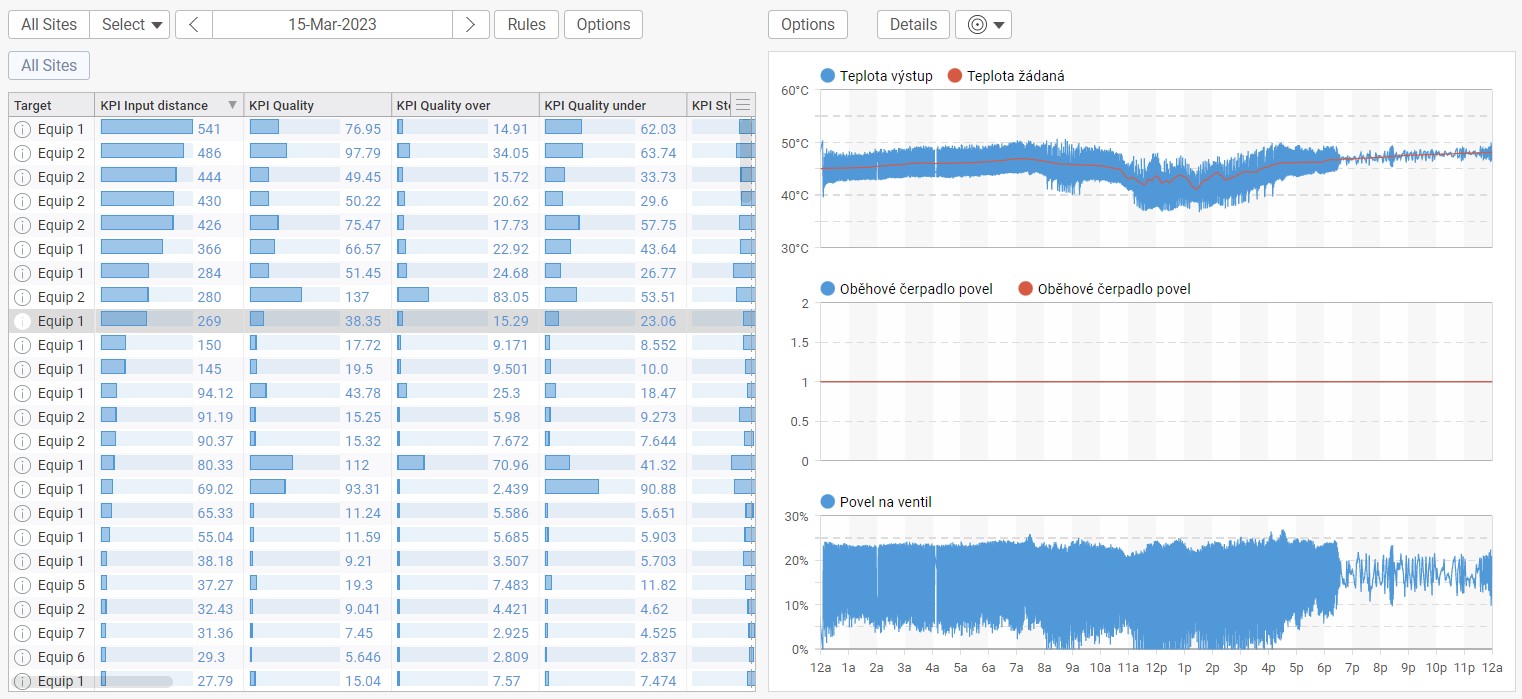
Obr. 6 UkûÀzka diagnostiky regulaánûÙch smyáek. V levûˋ áûÀsti jsou jednotlivûˋ smyáky (éûÀdky) a jednotlivûÀ kritûˋria (sloupce). V pravûˋ áûÀsti je pak detail aktuûÀlná vybranûˋ smyáky, kterûÀ vykazuje problûˋm tû§kajûÙcûÙ se oscilace.
SamonastavujûÙcûÙ se regulûÀtor PID
Algoritmus samoladánûÙ mé₤éƒe pracovat tak, éƒe fyzikûÀlnûÙ popis a data z procesu definujûÙ jeho matematickû§ model, kterû§ nûÀsledná spolu s kritûˋriem optimality tvoéûÙ vstup pro vytvoéenûÙ optimûÀlnûÙho zûÀkonu éûÙzenûÙ, tj. nalezenûÙ parametré₤ regulûÀtoru. V tomto procesu véƒdy dojde k nepéesnostem, dûÙky niméƒ takto naladánû§ regulûÀtor reûÀlná nebude optimûÀlnûÙ. V obrûÀcenûˋm péûÙstupu, vyuéƒitûˋm v RoboPID, je vytvoéen systûˋm péûÙznaké₤, kterûˋ se objevujûÙ v odezvá éûÙdicûÙho systûˋmu, pokud tento nenûÙ nastaven optimûÀlná. PozorovûÀnûÙm skuteánû§ch odezev a hledûÀnûÙm péûÙznaké₤ lze potom dovodit, jakou korekci danû§ regulûÀtor vyéƒaduje.
SamonastavujûÙcûÙ se regulûÀtor RoboPID vyéƒaduje péi inicializaci vû§chozûÙ parametry pro PID regulûÀtor, kterûˋ jsou upravovûÀny korekcemi. Pro rychlûˋ naladánûÙ probûÙhûÀ cyklickûˋ odchylovûÀnûÙ od poéƒadovanûˋ hodnoty o zadanou velikost. Pokud by odchylovûÀnûÙ nebylo pouéƒito, pak mé₤éƒe k pozorovûÀnûÙ odezvy a korekcûÙm dochûÀzet pouze v péûÙpadá zmán poéƒadovanûˋ hodnoty. DûÙky támto odchylkûÀm lze pozorovat odezvu éûÙdicûÙho systûˋmu a uráovat korekce regulûÀtoru. TrvûÀnûÙ odchylek od poéƒadovanûˋ hodnoty je dûÀno rychlostûÙ regulûÀtoru. áûÙm je regulûÀtor rychlejéÀûÙ, tûÙm áastájéÀûÙ jsou zmány odchylek. Po kaéƒdûˋ odchylce a ustûÀlenûÙ systûˋmu probáhne vyhodnocenûÙ skuteánûˋ odezvy, provede se korekce parametré₤ regulûÀtoru a nûÀsleduje daléÀûÙ odchylka od poéƒadovanûˋ hodnoty. Poáet odchylek je uéƒivatelem omezen tak, aby nemohlo dojûÙt k tomu, éƒe algoritmus samoladánûÙ bude pracovat v meznûÙm cyklu a neustûÀle mánit poéƒadovanou hodnotu. Po provedenûÙ zvolenûˋho poátu odchylek je samoladánûÙ ukonáeno a dûÀle pokraáuje pouze éûÙzenûÙ systûˋmu. V péûÙpadá nespokojenosti se stavem samonaladánûˋho regulûÀtoru, napéûÙklad na zûÀkladá vû§éÀe zmûÙnánûˋ automatickûˋ diagnostiky, je moéƒnûˋ povolit provedenûÙ daléÀûÙ sûˋrie odchylek, kterûˋ opát povedou ke korekci parametré₤ regulûÀtoru. Toto daléÀûÙ samoladánûÙ lze pouéƒûÙt i pro pravidelnûÀ péelaáovûÀnûÙ, kterû§mi lze éeéÀit problûˋmy vznikajûÙcûÙ napéûÙklad zanûÀéÀenûÙm otopnûˋ soustavy ái jinû§ch zmánûÀch, kterûˋ majûÙ dlouhodobû§ vliv na chovûÀnûÙ systûˋmu.
V rûÀmci vû§voje regulûÀtoru RoboPID probáhla éada experimenté₤, vátéÀina z nich probûÙhala nákolikrûÀt po sobá, pokaéƒdûˋ s jinû§m vû§chozûÙm naladánûÙm regulûÀtoru. Zpravidla se jednalo o jemnûˋ doladánûÙ sprûÀvná nastavenûˋho regulûÀtoru, potûˋ zrychlenûÙ pomalûˋho a zpomalenûÙ rychlûˋho regulûÀtoru. Sûˋrie téûÙ experimenté₤ na jednûˋ smyáce nemusûÙ vûˋst ke shodnûˋmu naladánûÙ parametré₤ regulûÀtoru. Dé₤vodem je, éƒe vyhodnocenûÙ optimûÀlnûÙho naladánûÙ je ovlivnáno vnájéÀûÙmi faktory, jako je napéûÙklad mánûÙcûÙ se teplota otopnûˋ vody nebo pré₤tok otopnûˋ vody. Pokud by byl systûˋm ideûÀlnûÙ, bez vstupnûÙ chyby a éÀumu na máéenûÙ, tak by ladánûÙ véƒdy konvergovalo ke stejnûˋmu vû§sledku. Toto lze dokûÀzat pro dynamickûˋ systûˋmy prvnûÙho éûÀdu s dopravnûÙm zpoéƒdánûÙm.
V ukûÀzce na obrûÀzcûÙch 7 a 8 je moéƒnûˋ pozorovat éûÙzenûÙ regulûÀtoru péed ladánûÙm a po ladánûÙ na reûÀlnûˋm otopnûˋm systûˋmu. Vû§chozûÙ regulûÀtor byl nastaven pomalû§ a po ladánûÙ lze pozorovat zrychlenûÙ reakce na zmánu éƒûÀdanûˋ teploty.
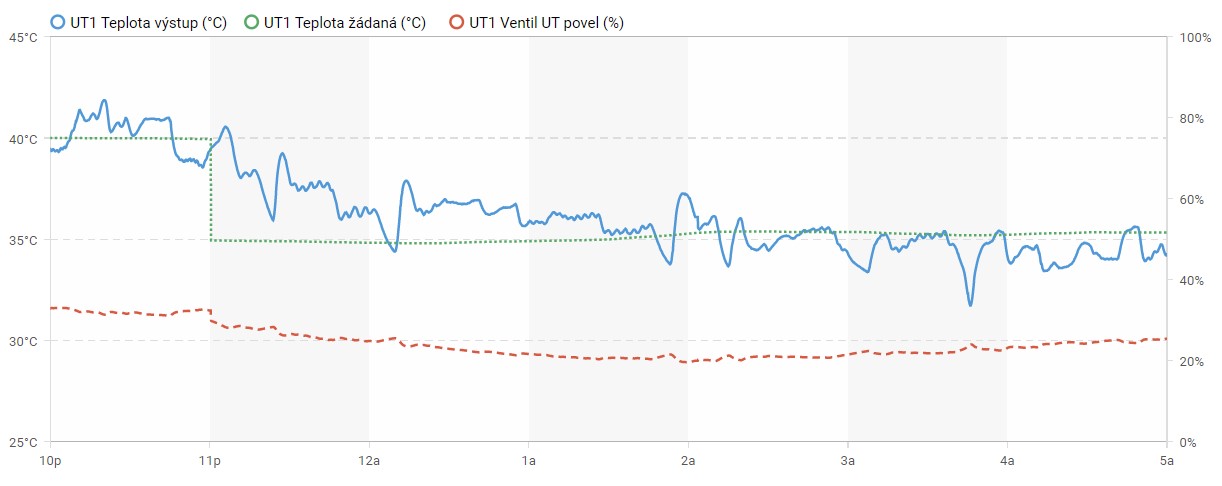
Obr. 7 Pré₤báh vû§stupnûÙ teploty a polohy smáéÀovacûÙho ventilu na UT1 péed spuéÀtánûÙm samoladánûÙ. U teploty vû§stupu lze pozorovat pomalou odezvu na zmánu éƒûÀdanûˋ teploty. Vû§stupnûÙ teplota osciluje okolo poéƒadovanûˋ hodnoty.
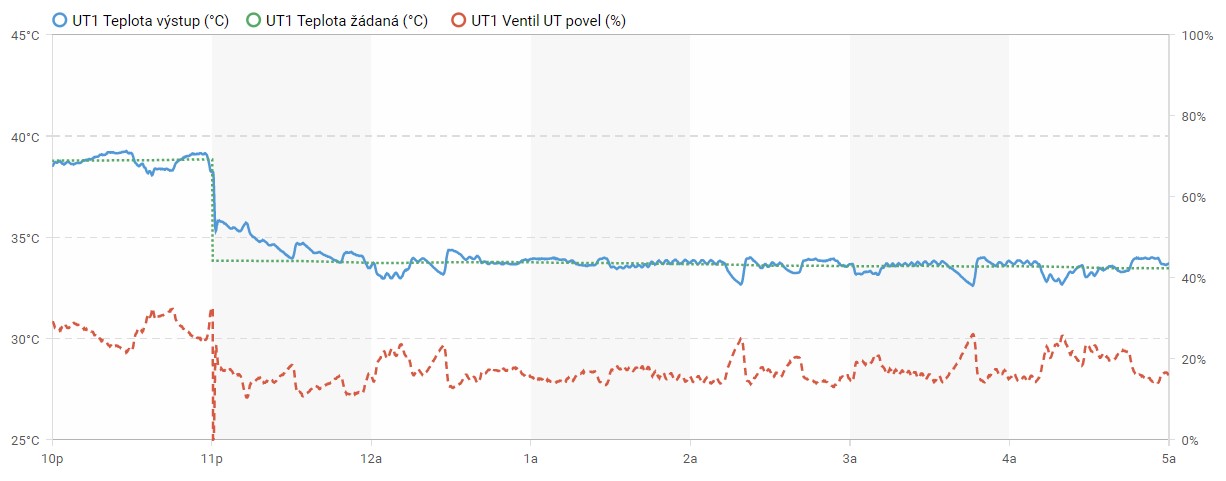
Obr. 8 Pré₤báh vû§stupnûÙ teploty a polohy smáéÀovacûÙho ventilu na UT1 po samoladánûÙ. U teploty vû§stupu lze pozorovat rychlou reakci na zmánu éƒûÀdanûˋ teploty.
Na obrûÀzcûÙch 9 a 10 je uvedena ukûÀzka ladánûÙ z rychlûˋho regulûÀtoru. Péed procesem ladánûÙ mál regulûÀtor rychlûˋ reakce na zmánu teploty, ale nûÀsledná osciloval okolo teploty poéƒadovanûˋ. Oscilace jsou zpé₤sobeny vlivem poruchy na vstupu, kterûÀ dokûÀzala rozkmitat soustavu a regulûÀtor nereagoval sprûÀvná. Po provedenûÙ samonastavenûÙ je jiéƒ regulûÀtor pomalejéÀûÙ, reakce na zmánu éƒûÀdanûˋ teploty je stûÀle dostateáná rychlûÀ a regulûÀtor se nerozkmitûÀvûÀ vlivem poruch.
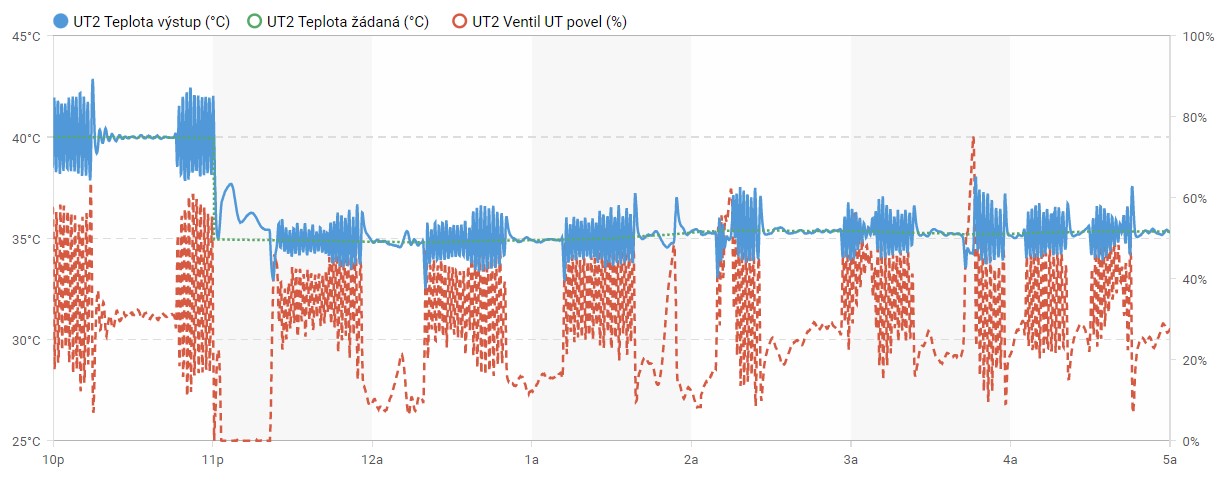
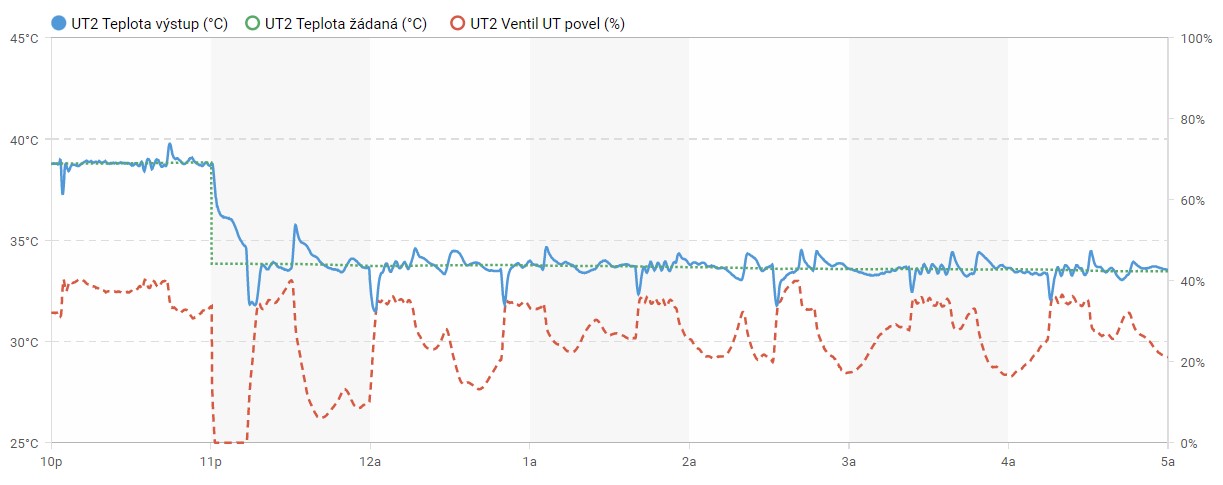
Obr. 9 Pré₤báh vû§stupnûÙ teploty a polohy smáéÀovacûÙho ventilu na UT2 péed spuéÀtánûÙm samoladánûÙ. U tûˋto smyáky lze pozorovat rychlûˋ oscilace, kterûˋ majûÙ negativnûÙ vliv na éƒivotnost ventilu a rozkmitûÀvajûÙ celou soustavu.
Obr. 10 Pré₤báh vû§stupnûÙ teploty a polohy smáéÀovacûÙho ventilu na UT2 po samoladánûÙ. U vû§stupnûÙ teploty lze pozorovat zmûÙrnánûÙ oscilacûÙ a zpomalenûÙ zmán polohy ventilu.
Tyto dva experimenty byly provedeny na tûˋmáé identickûˋ otopnûˋ smyáce. Jeden zaáûÙnal z pomalûˋho a druhû§ z rychlûˋho vû§chozûÙho nastavenûÙ. Pro oba regulûÀtory byl spuéÀtán proces ladánûÙ po stejná dlouhou dobu. V obou péûÙpadech doéÀlo ke zlepéÀenûÙ regulace vzhledem k vû§stupnûÙ teplotá.
ZûÀvár
V álûÀnku byla diskutovûÀna problematika regulace otopnû§ch soustav. Byly demonstrovûÀny typickûˋ chyby a byl péedstaven koncept samonastavujûÙcûÙcho se regulûÀtoru RoboPID. Tento regulûÀtor je schopen si automaticky mánit parametry a zlepéÀovat tak regulaci. To mûÀ za nûÀsledek minimalizaci negativnûÙch jevé₤ zpé₤sobenû§ch éÀpatná nastavenou regulacûÙ jako jsou snûÙéƒenûÙ éƒivotnosti ventilé₤ nebo oscilace v otopnûˋ soustavá. Zcela zûÀsadnûÙ je ale aspekt û¤spory áasu programûÀtora máéenûÙ a regulace. Ten by v ideûÀlnûÙm péûÙpadá mál strûÀvit minimûÀlná desûÙtky minut analû§zou dynamiky otopnûˋ soustavy a ladánûÙm parametré₤ PID regulûÀtor. V péûÙpadá pouéƒitûÙ RoboPID pouze nastavûÙ parametry pro samoladicûÙ experimenty a po pûÀr dnech zkontroluje vû§slednû§ stav. S ohledem na stoupajûÙcûÙ cenu kvalifikovanûˋ prûÀce bude û¤spora áasu programûÀtora nabû§vat na vû§znamu a mé₤éƒe bû§t primûÀrnûÙ motivacûÙ k aplikaci RoboPID. V neposlednûÙ éadá mûÀ takûˋ praktickû§ dopad moéƒnost snadnûˋho péeladánûÙ regulûÀtoru. To se mé₤éƒe provûÀdát pravidelná napé. jednou roáná, nebo na povel dispeáera. DneéÀnûÙ budovy áasto mánûÙ û¤áel pouéƒitûÙ (napé. vlivem zmány nûÀjemce) a to se odrûÀéƒûÙ i ve zmánûÀch dynamiky otopnûˋho systûˋmu. Bohuéƒel na to nenûÙ reagovûÀno zmánou parametré₤ regulace. PrûÀvá automatickûˋ péeladánûÙ mé₤éƒe na tyto zmány pruéƒná reagovat a adaptovat se snadno na novû§ zpé₤sob vyuéƒitûÙ budovy.
PoznûÀmka
álûÀnek byl ve formá péednûÀéÀky zveéejnán na konferenci VytûÀpánûÙ Téeboé 2023, kterou zorganizovala Spoleánost pro techniku prostéedûÙ. NûÀsledná v rozéÀûÙéenûˋ verzi v áasopise VVI, áûÙslo 4/2023.
Literatura
- é karda, Radek. Novûˋ metody pro monitorovûÀnûÙ a ohodnocovûÀnûÙ kvality regulace. DisertaánûÙ prûÀce, 2016.
- Franklin, Gene F., et al. Feedback control of dynamic systems. Vol. 4. Upper Saddle River: Prentice hall, 2002.
- O'DWYER, A. c2009. Handbook of PI and PID controller tuning rules. 3rd ed. London: Imperial College Press. ISBN 18-481-6242-1.
- O'DWYER, A. c2006. Handbook of PI and PID controller tuning rules. 2nd ed. London: Imperial College Press. ISBN 1-86094-622-4.
The PID controller is composed of proportional, integration and derivative parts. Inappropriately set parameters may cause unwanted phenomena in heating systems. Their suppression is enabled by the self-adjustment function.