AutomatizovanÃĄ kontrola kvality realizÃĄcie stavebnÃ―ch objektov

ÄlÃĄnok sa zaoberÃĄ informaÄnÃ―m modelovanÃm stavieb a tvorbou digitÃĄlnych dvojÄiat stavieb vyuÅūitÃm modernÃ―ch metÃģd zberu priestorovÃ―ch Údajov (TLS a fotogrametria), priÄom predstavuje algoritmus na automatizovanÚ kontrolu vyhotovenia stavebnÃ―ch objektov. Popisuje algoritmus pre automatizovanÚ tvorbu rozdielovÃ―ch modelov medzi BIM modelom a Údajmi zÃskanÃ―mi z TLS resp. fotogrametricky. VÃ―sledky slÚÅūia na verifikÃĄciu geometrickÃ―ch parametrov konÅĄtrukÄnÃ―ch prvkov (ako napr. rovinnosÅĨ stien, priamosÅĨ potrubÃ), ako aj urÄenie odchÃ―lok ich umiestnenia (poloha a orientÃĄcia) od samotnÃĐho projektu (BIM modelu). Takto zÃskanÃĐ Ãšdaje slÚÅūia ako podklad na kvalifikÃĄciu a kvantifikÃĄciu odchÃ―lok poÄas riadenia vÃ―stavby.

ÄlÃĄnek byl vydÃĄn v rÃĄmci odbornÃĐ konference doktorskÃĐho studia Juniorstav 2021. Byl ocenÄn odbornou porotou konference a okomentovÃĄn spolupracovnÃky redakce TZB Info.
1. Ãvod
V sÚÄasnej dobe vstupujÚ informaÄnÃĐ technolÃģgie Äoraz intenzÃvnejÅĄie do procesu ÅūivotnÃĐho cyklu stavby od projektovania aÅū po prevÃĄdzku stavieb. VhodnÃ―m nÃĄstrojom, ktorÃ― sa v poslednÃ―ch rokoch vyuÅūÃva poÄas celÃĐho Åūivota stavby, je informaÄnÃĐ modelovanie stavieb (v angl. Building Information Modelling) znÃĄme pod pojmom BIM, ktorÃĐho vÃ―sledkom je virtuÃĄlny model stavby (BIM model). Na Slovensku je v poslednÃ―ch rokoch intenzÃvna snaha zavÃĄdzaÅĨ BIM do stavebnÃĐho cyklu, ktorÃĐho neoddeliteÄūnou sÚÄasÅĨou sÚ aj geodeti a tÃ―m pÃĄdom BIM predstavuje novÃ― prÃstup k vÃ―konu geodetickÃ―ch a kartografickÃ―ch Äinnostà v investiÄnej vÃ―stavbe. BIM model spolu s inovatÃvnymi metÃģdami zberu priestorovÃ―ch informÃĄcià umoÅūÅujÚ detailnÚ kontrolu skutoÄnÃĐho vyhotovenia stavebnÃ―ch diel. V sÚÄasnosti najefektÃvnejÅĄÃmi metÃģdami zberu informÃĄcià sÚ terestrickÃĐ laserovÃĐ skenovanie (TLS) resp. blÃzka fotogrametria, ktorÃ―ch vÃ―sledkom sÚ mraÄnÃĄ bodov. PrÃĄve vyuÅūitie informÃĄcià obsiahnutÃ―ch v detailnÃ―ch mraÄnÃĄch bodov a informÃĄcià BIM modelu je vhodnÃ―m nÃĄstrojom na kontrolu kvality danÃĐho diela, ÄastokrÃĄt aÅū v reÃĄlnom Äase.
CieÄūom predkladanÃĐho ÄlÃĄnku je predstaviÅĨ nÃĄvrh automatizovanÃĐho algoritmu na kontrolu vyhotovenia stavebnÃ―ch objektov v softvÃĐrovom prostredà Matlab©, priÄom pre automatizovanÃ― vÃ―poÄet bola vytvorenÃĄ samostatnÃĄ aplikÃĄcia. AplikÃĄcia slÚÅūi na kontrolu kvality realizÃĄcie stavebnÃ―ch objektov, priÄom vstupnÃ―mi Údajmi sÚ BIM model (projekt) a mraÄno bodov (realizÃĄcia).
2. AplikÃĄcia pre automatizovanÚ kontrolu stavebnÃ―ch objektov
AutomatizovanÃĄ kontrola stavebnÃ―ch objektov znamenÃĄ kontrolu polohy, orientÃĄcie a rovinnosti stien. OdchÃ―lky realizovanÃĐho stavebnÃĐho objektu od projektu sÚ vyjadrenÃĐ rozdielovÃ―mi modelmi. K tomu, aby mohli byÅĨ vyhotovenÃĐ rozdielovÃĐ modely, je potrebnÃĐ zÃskaÅĨ roviny jednotlivÃ―ch geometrickÃ―ch objektov z projektu (BIM modelu) a z realizÃĄcie (mraÄna bodov).
InformaÄnÃĐ modelovanie stavieb (BIM) je 3D modelovanie stavieb, vyuÅūÃvanÃĐ v rÃīznych odvetviach stavebnÃĐho priemyslu, ktorÃĐho vÃ―sledkom je BIM model. PoslednÃĐ roky je BIM vo svete aj na Slovensku vyuÅūÃvanÃĐ Äoraz ÄastejÅĄie pri novÃ―ch projektoch, ale aj pri rekonÅĄtruovanÃ―ch stavbÃĄch. NakoÄūko sa BIM modely vyuÅūÃvajÚ poÄas celÃĐho Åūivota stavby, je potrebnÃĐ vyuÅūÃvaÅĨ vÃ―mennÃĐ formÃĄty pre zdieÄūanie dÃĄt. ExistujÚ rÃīzne vÃ―mennÃĐ formÃĄty pre BIM modely, naprÃklad CAD formÃĄty, CIS/2, CityGML, priÄom kaÅūdÃ― vÃ―mennÃ― formÃĄt je zameranÃ― na inÃĐ Ãšdaje. NajÄastejÅĄie pouÅūÃvanÃ―m vÃ―mennÃ―m formÃĄtom je IFC (v angl. Industry Foundation Classes). IFC je textovÃ― sÚbor v ASCII (v angl. American Standard Code for Information Interchange) kÃģde, ktorÃĐho cieÄūom je poskytnÚÅĨ otvorenÃ― a neutrÃĄlny prÃstup na ukladanie a vÃ―menu BIM modelov medzi rÃīznymi softvÃĐrovÃ―mi aplikÃĄciami [1].
Pre zber priestorovÃ―ch Údajov je jednou z najefektÃvnejÅĄÃch metÃģd terestrickÃĐ laserovÃĐ skenovanie (TLS), ktorÃĐho vÃ―sledkom je mraÄno bodov. MetÃģdou TLS je moÅūnÃĐ vykonaÅĨ bezkontaktnÃ― zber Údajov, ktorÃ― je v porovnanà s inÃ―mi metÃģdami rÃ―chlejÅĄÃ a vÃ―sledok je detailnÃ― (vzhÄūadom na parametre skenovania). MraÄnÃĄ bodov sa ÄastokrÃĄt pouÅūÃvajÚ na generovanie geometrie pre BIM modely.
IdentifikÃĄcia geometrickÃ―ch parametrov rovÃn z IFC sÚboru
VÃ―mennÃ― formÃĄt IFC predstavuje otvorenÚ ÅĄpecifikÃĄciu pre Údaje z BIM modelov o geometrickÃ―ch objektoch, ktorÃĐ sa vymieÅajÚ a zdieÄūajÚ medzi rÃīznymi ÚÄastnÃkmi projektu stavby alebo sprÃĄvy budov [1]. FormÃĄt IFC vyvinulo medzinÃĄrodnÃĐ zdruÅūenie pre interoperabilitu (v angl. BuildingSMART), priÄom je ÅĄtandardizovanÃ― normou ISO 16739:2018 Industry Foundation Classes (IFC) pre zdieÄūanie dÃĄt v stavebnÃctve a facility managemente.
IFC sa skladÃĄ z hlaviÄky a z popisu geometrickÃ―ch prvkov v rÃĄmci BIM modelu. Zo sÚboru je potrebnÃĐ identifikovaÅĨ pre jeden prvok sÚradnice zaÄiatoÄnÃĐho bodu (IfcCartesianPoint), smer (IfcDirection), dÄšÅūku (RectangleProfileDef), vÃ―ÅĄku (IfcExtrudeAreaSolid) a hrÚbku (IfcWall) (Obr. 1).
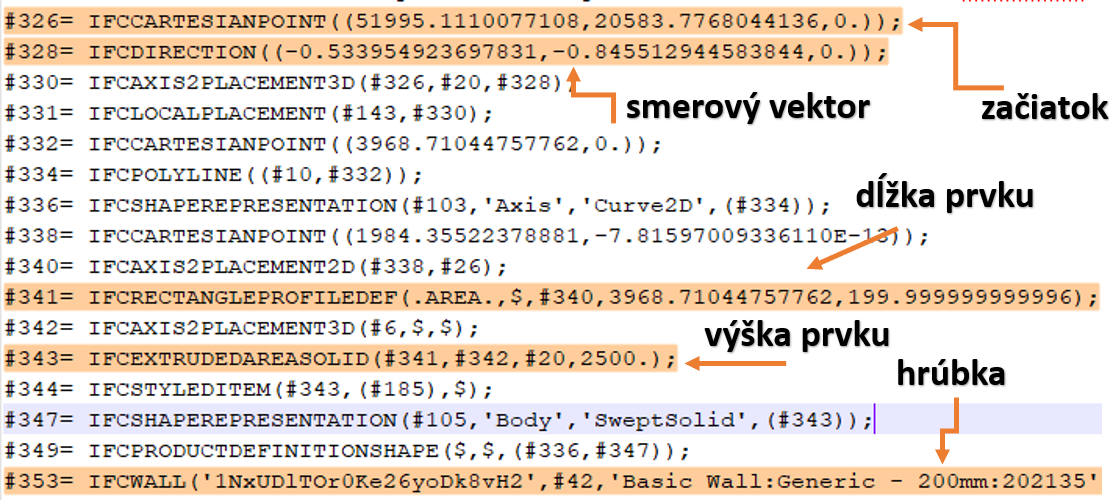
Obr. 1 DefinÃcia geometrie steny v IFC sÚbore
IdentifikovanÃĐ Ãšdaje slÚÅūia na odhad parametrov roviny steny, priÄom sa najprv vypoÄÃtajÚ sÚradnice ÅĄtyroch rohov roviny steny pomocou priestorovej polÃĄrnej metÃģdy, z nich sa nÃĄsledne vypoÄÃta ÅĨaÅūisko roviny steny. Na zÃĄklade tÃ―chto bodov sa odhadujÚ koeficienty vÅĄeobecnej rovnice roviny steny (1) pomocou singulÃĄrnej dekompozÃcie matice redukovanÃ―ch sÚradnÃc.
kde a, b, c sÚ prvky normÃĄlovÃĐho vektora, d je ÄÃslo, ktorÃĐho hodnota sa rovnÃĄ skalÃĄrnemu sÚÄinu normÃĄlovÃĐho vektora a polohovÃĐho vektora ÄūubovoÄūnÃĐho bodu, X, Y, Z sÚ priestorovÃĐ sÚradnice bodu.
SegmentÃĄcia rovÃn z mraÄna bodov
Algoritmus na spracovanie mraÄien bodov je zaloÅūenÃ― na kombinÃĄcià prvkov modifikovanÃĐho RANSAC (v angl. RANdom SAmple Consensus) algoritmu a metÃģdy povrchov [2], pomocou ktorÃĐho segmentuje z mraÄna bodov roviny prislÚchajÚce rovinÃĄm identifikovanÃ―m z IFC. SamotnÃ― RANSAC algoritmus je zaloÅūenÃ― na iterÃĄciÃĄch odhadnutÃ―ch parametrov geometrickÃ―ch prvkov zo sÚboru pozorovanÃ―ch Údajov, ktorÃĐ obsahujÚ odÄūahlÃĐ hodnoty [3].
SegmentÃĄcia sa zaÄÃna vÃ―berom 100 najbliÅūÅĄÃch bodov od ÅĨaÅūiska roviny steny (zÃskanÃ― z IFC sÚboru), priÄom poÄet prvÃ―ch bodov zÃĄvisà od hustoty mraÄna bodov. NÃĄsledne sa oblasÅĨ tÃ―chto bodov aproximuje rovinou, ktorÃĄ sa odhaduje ortogonÃĄlnou regresiou [2]. V tomto prÃpade vychÃĄdza rieÅĄenie zo vÅĄeobecnej rovnice roviny (1). VyuÅūÃva sa ÅĨaÅūisko roviny steny, ktorÃĐ sa zÃska z IFC, priÄom sa vyuÅūÃva vzÅĨah (2).
 (2)
(2)
kde X, Y, Z sÚ sÚradnice 4 rohov rovÃn steny. NÃĄsledne sa urÄia redukovanÃĐ sÚradnice (sÚradnicovÃĐ rozdiely) vzÅĨahom:
Äalej sa pomocou sÚradnicovÃ―ch rozdielov zostavà matica redukovanÃ―ch sÚradnÃc a vykonÃĄ sa singulÃĄrny rozklad matice (v angl. Singular Value Decomposition) redukovanÃ―ch sÚradnÃc rieÅĄenÃm rovnice [3]:
kde A je matica redukovanÃ―ch sÚradnÃc, stÄšpcovÃĐ vektory U sÚ normovanÃĐ vlastnÃĐ vektory matice AAT, V sÚ normovanÃĐ vlastnÃĐ vektory matice ATA a Σ je diagonÃĄlna matica s prvÃ―mi tromi singulÃĄrnymi ÄÃslami matice ATA na hlavnej diagonÃĄle. NormÃĄlovÃ― vektor regresnej roviny je teda stÄšpcovÃ―m vektorom matice V, ktorÃĄ prislÚcha najmenÅĄiemu singulÃĄrnemu ÄÃslu matice ATA [3]. TÃ―mto spÃīsobom sÚ zÃskanÃĐ koeficienty a, b, c vÅĄeobecnej rovnice roviny, ktorÃĐ tvoria normÃĄlny vektor roviny. Parameter d sa zÃska, tÃ―m Åūe sa do normÃĄlneho vektora dosadia sÚradnice ÅĨaÅūiska X0, Y0, Z0, vypoÄÃtanÃĐho z mraÄna vybranÃ―ch bodov (5).
V ÄalÅĄom kroku sa oblasÅĨ vybranÃ―ch bodov zvÃĪÄÅĄÃ na 1000 najbliÅūÅĄÃch bodov a testuje sa, Äi leÅūia v odhadnutej rovine. Algoritmus pri kaÅūdom zvÃĪÄÅĄenà poÄtu vybranÃ―ch bodov porovnÃĄva, Äi leÅūia v odhadnutej rovine z predchÃĄdzajÚcej iterÃĄcie [2]. Rovina je prepoÄÃtanÃĄ po kaÅūdej iterÃĄcii pomocou vÅĄetkÃ―ch bodov, ktorÃĐ spÄšÅajÚ kritÃĐrium ortogonÃĄlnej vzdialenosti od odhadnutej roviny. V kaÅūdej ÄalÅĄej iterÃĄcià sa poÄet bodov zvÃĪÄÅĄuje ÅĄtvornÃĄsobne a opakuje sa vÃ―poÄet pomocou vzÅĨahov (2) aÅū (5). IteratÃvny vÃ―poÄet prebieha dovtedy, kÃ―m oblasÅĨ roviny prestane rÃĄsÅĨ, resp. pokÃ―m sa nÃĄjde vÅūdy aspoÅ jeden bod, ktorÃ― by ovplyvnil odhadnutÚ rovinu [4]. PrahovÃĄ hodnota, ktorÃĄ nÃĄm udÃĄva dÄšÅūkovÃĐ kritÃĐrium pre vzdialenosÅĨ segmentovanÃ―ch bodov od odhadnutej regresnej roviny, je v tomto prÃpade odporÚÄanÃĄ v intervale do 100 mm.
FiltrÃĄcia bodov na zÃĄklade normÃĄlovÃ―ch vektorov
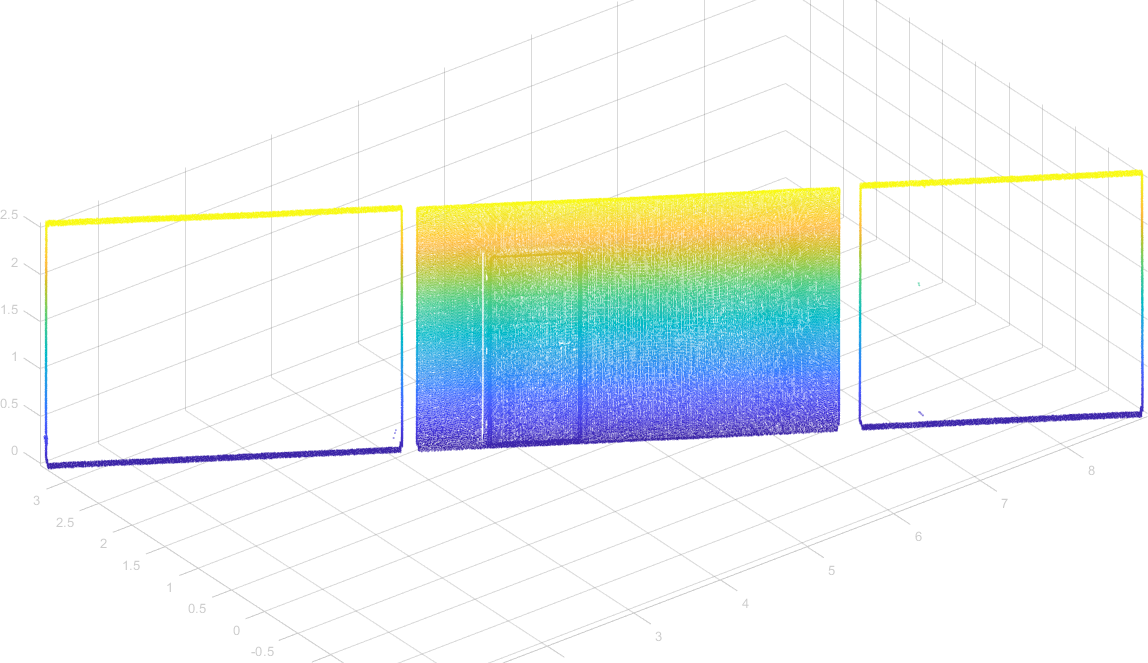
Obr. 2 SegmentovanÃĐ body pred filtrÃĄciou na zÃĄklade normÃĄl
Po segmentÃĄcià sa pristupuje ku filtrÃĄcià bodov na zÃĄklade lokÃĄlnych normÃĄl bodov mraÄna, nakoÄūko sa pri segmentÃĄcià vyuÅūÃva dÄšÅūkovÃĐ kritÃĐrium, pri ktorom sa segmentujÚ nielen body roviny steny, ale aj vedÄūajÅĄÃch konÅĄtrukÄnÃ―ch prvkov, ktorÃĐ vyhovujÚ dÄšÅūkovÃĐmu kritÃĐriu (Obr. 2).
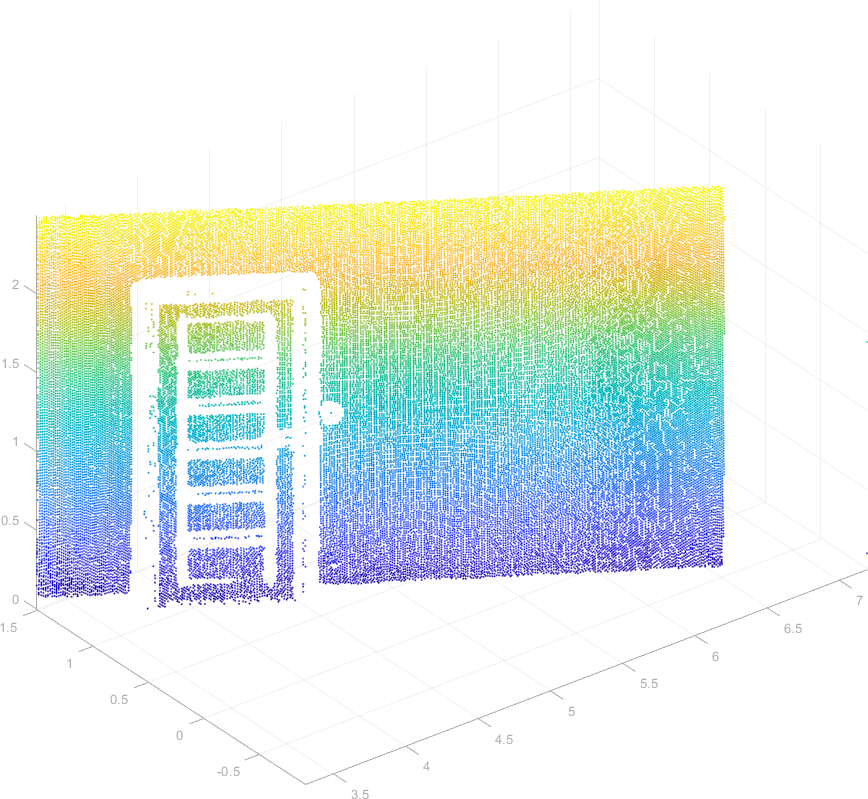
Obr. 3 SegmentovanÃĐ body po filtrÃĄcii na zÃĄklade normÃĄl
V prvom kroku segmentÃĄcie sa aplikuje na mraÄno bodov vÃ―poÄet lokÃĄlnych normÃĄl v kaÅūdom bode mraÄna, a to tak, Åūe je odhadnutÃĄ lokÃĄlna rovina z k-najbliÅūÅĄÃch susedov (v angl. Nearest Neighbor). PoÄet najbliÅūÅĄÃch bodov definuje veÄūkosÅĨ roviny, ku ktorej sa poÄÃtajÚ normÃĄly v danom bode mraÄna a zÃĄvisà od hustoty mraÄna bodov. VypoÄÃtanÃĐ normÃĄlovÃĐ vektory sa skalÃĄrne vynÃĄsobia normÃĄlovÃ―m vektorom prÃsluÅĄnÃ―ch rovÃn zÃskanÃ―ch po segmentÃĄcià (6) a nÃĄsledne je moÅūnÃĐ vypoÄÃtaÅĨ uhol, ktorÃ― zvierajÚ.
kde nPoC je normÃĄlovÃ― vektor prÃsluÅĄnej regresnej roviny mraÄna bodov a npoint je normÃĄlovÃ― vektor bodov testovanej lokÃĄlnej roviny.
KeÄÅūe roviny stien nie sÚ dokonalo rovinnÃĐ, je potrebnÃĐ definovaÅĨ vstupnÚ hodnotu pre maximÃĄlne odchÃ―lky normÃĄl. OdporÚÄanÃĄ hodnota sÚ maximÃĄlne 4° pri nerovnÃ―ch stenÃĄch. TÃ―mto krokom sa zo segmentovanÃĐho mraÄna odstrÃĄnia body, ktorÃĐ prislÚchajÚ konÅĄtrukÄnÃ―m prvkom priamo nesÚvisiacimi s rovinou steny (napr. roviny stien vedÄūajÅĄÃch miestnostÃ, ÄasÅĨ dverà apod.) (Obr. 3).
Tvorba rozdielovÃ―ch modelov
Pre kaÅūdÚ rovinu steny sa generujÚ dva rozdielovÃĐ modely (Obr. 4, Obr. 5). PrvÃ― rozdielovÃ― model je porovnanie roviny BIM modelu a jej prislÚchajÚcej roviny segmentovanej z mraÄna bodov. DruhÃ― rozdielovÃ― model zobrazuje rovinnosÅĨ stien. Pre oba rozdielovÃĐ modely boli poÄÃtanÃĐ maximÃĄlne a minimÃĄlne odchÃ―lky, priemernÃĐ odchÃ―lky a absolÚtne maximum odchÃ―lok. Pre prvÃ― rozdielovÃ― model, bolo poÄÃtanÃĐ aj pootoÄenie roll a odchÃ―lka δ dvoch rovÃn. PootoÄenie rovÃn sa poÄÃta vzÅĨahom (7) a odchÃ―lku rovÃn sa poÄÃta vzÅĨahom (8).
kde roll je natoÄenie rovÃn, nIFC je normÃĄlovÃ― vektor roviny steny z BIM modelu a nPoC je normÃĄlovÃ― vektor odhadnutej regresnej roviny zo segmentovanÃĐho mraÄna bodov, ktorÃĄ prislÚcha rovine steny z BIM modelu.
kde δ je vzdialenosÅĨ dvoch regresnÃ―ch rovÃn, dIFC je rovnÃ― skalÃĄrnemu sÚÄinu normÃĄlovÃĐho vektora roviny BIM modelu s ÄūubovoÄūnÃ―m polohovÃ―m vektorom roviny BIM modelu a dPoC je rovnÃ― skalÃĄrnemu sÚÄinu normÃĄlovÃĐho vektora roviny segmentovanÃĐho mraÄna bodov s ÄūubovoÄūnÃ―m polohovÃ―m vektorom odhadnutej regresnej roviny z mraÄna bodov.
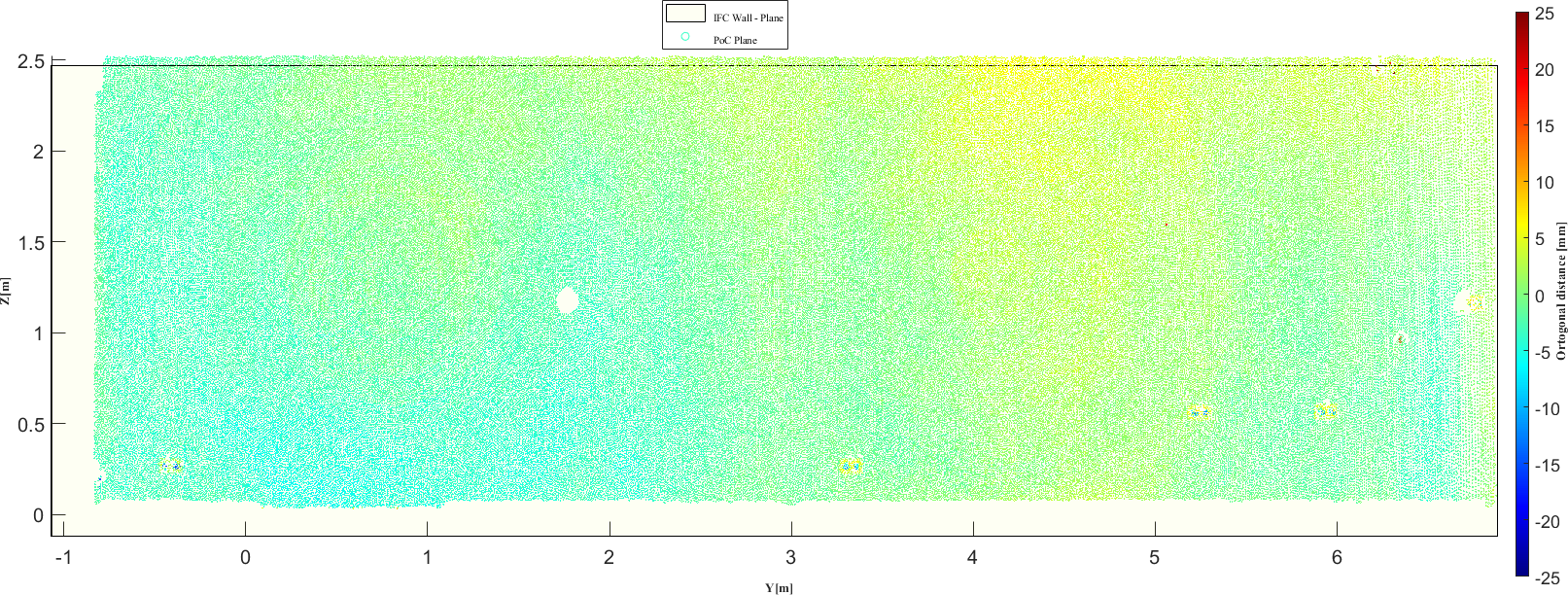
Obr. 4 Porovnanie roviny BIM modelu a regresnej roviny segmentovanej z mraÄna bodov
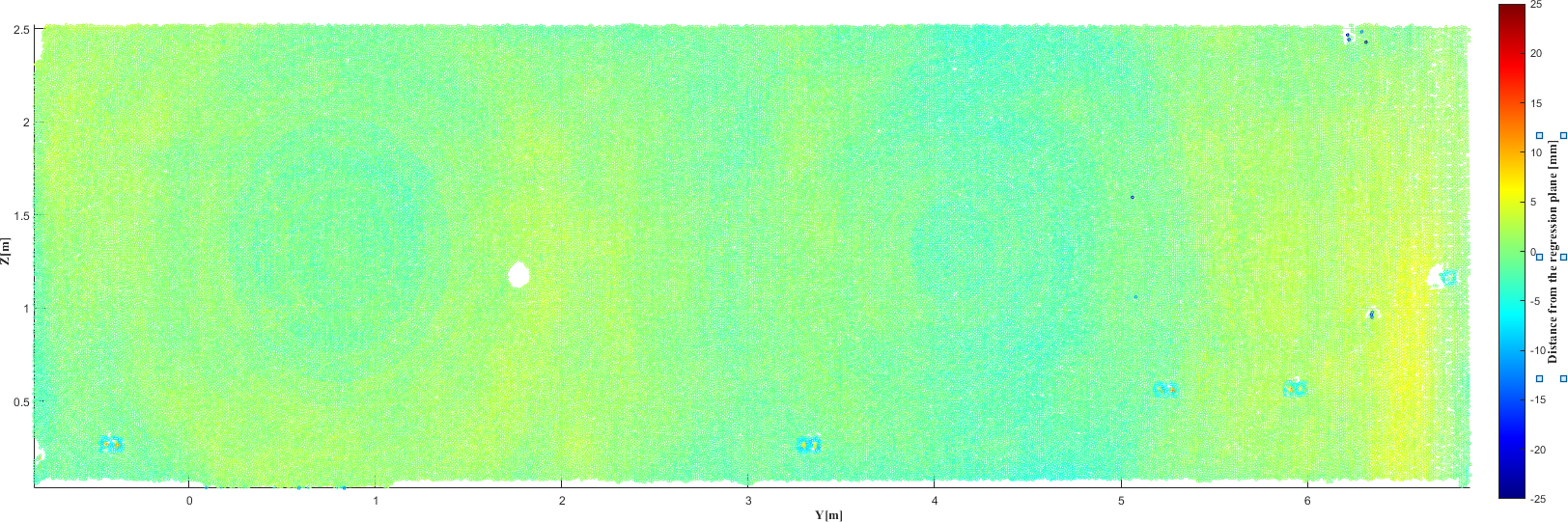
Obr. 5 RovinnosÅĨ roviny steny
VÃ―voj samostatnej aplikÃĄcie
Aby bolo moÅūnÃĐ kontrolu stavebnÃ―ch objektov vykonaÅĨ automatizovane, bola vytvorenÃĄ samostatnÃĄ aplikÃĄcia v softvÃĐri Matlab©. Ako prvÃĐ si pouÅūÃvateÄū vyberie v dialÃģgom okne (Obr. 6) adresÃĄr, nÃĄsledne v aplikÃĄcià naÄÃta BIM model vo formÃĄte IFC a mraÄno bodov vo formÃĄte *.pts, *.txt alebo *.xyz. NÃĄsledne pouÅūÃvateÄū definuje vstupnÃĐ parametre: prahovÚ hodnotu pre segmentÃĄciu mraÄna bodov a maximÃĄlnu odchÃ―lku normÃĄl. Po naÄÃtanà vstupnÃ―ch sÚborov a nastavenà vstupnÃ―ch parametrov sa spustà vÃ―poÄet tlaÄidlom RUN. V rÃĄmci vÃ―poÄtu prebehne identifikÃĄcia geometrickÃ―ch parametrov z IFC, segmentÃĄcia rovÃn z mraÄna bodov a vÃ―poÄet vÃ―sledkov kontroly objektu, priÄom vÃ―sledkom sÚ 2 rozdielovÃĐ modely pre kaÅūdÚ rovinu steny a sÚbor *.xlsx s ÄÃselnÃ―mi charakteristikami rovÃn.
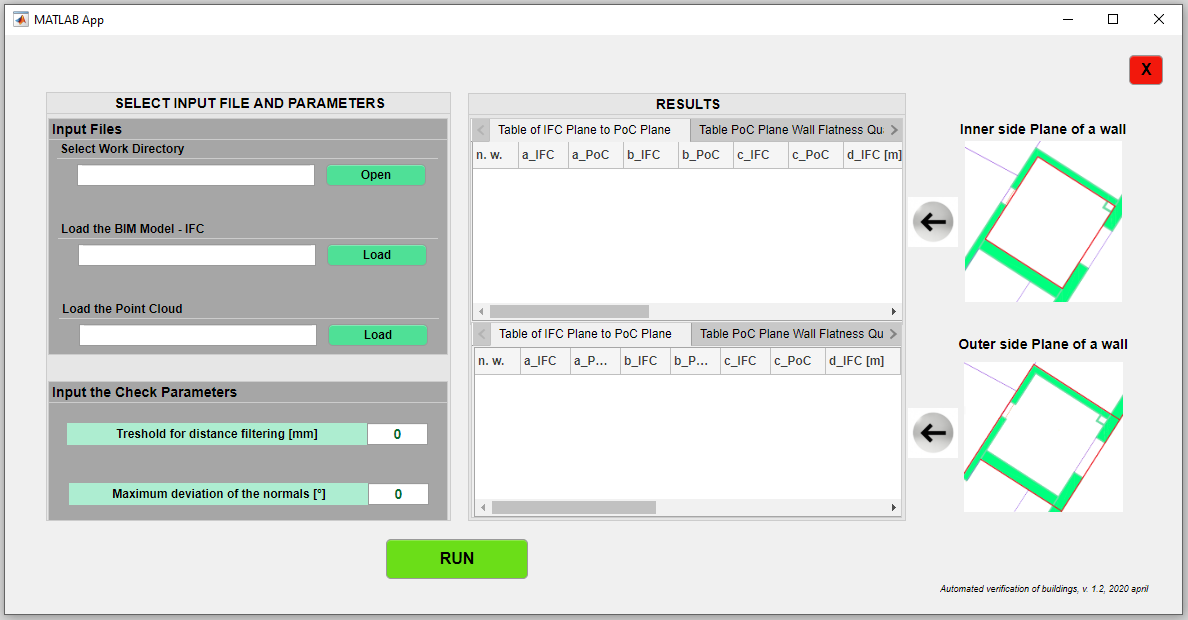
Obr. 6 DialÃģgovÃĐ okno aplikÃĄcie
3. PrÃpadovÃĄ ÅĄtÚdia
VerifikÃĄciu vyÅĄÅĄie spomÃnanÃĐho algoritmu sme vykonali na zÃĄklade prÃpadovej ÅĄtÚdie, v rÃĄmci ktorej sme kontrolovali geometrickÃĐ parametre stien bytu na zÃĄklade BIM modelu (Obr. 7) a Údajov z TLS (Obr. 7). JednÃĄ sa o trojizbovÃ― byt s rozlohou pribliÅūne 70 m2. Pre verifikÃĄciu bolo mraÄno bodov prevzorkovanÃĐ na hustotu 10 mm. PrahovÃĄ hodnota pre segmentÃĄciu mraÄien bola 50 mm a maximÃĄlna odchÃ―lka normÃĄl bola volenÃĄ v hodnote 3°.
VÃ―sledky porovnania dvoch modelov rovÃn, ktorÃĐ ukazujÚ najvÃĪÄÅĄie odchÃ―lky sa nachÃĄdzajÚ v Tab. 1 aÅū Tab. 3, priÄom Tab. 1 sa zaoberÃĄ porovnanÃm parametrov rovÃn z BIM modelu a z mraÄna bodov, Tab. 2 sa nachÃĄdzajÚ vzÃĄjomnÃĐ polohy rovÃn z BIM modelu a mraÄna bodov a Tab. 3 zobrazuje rovinnosÅĨ roviny. V tabuÄūkÃĄch sa nachÃĄdzajÚ vÃ―sledky len pre jednu rovinu steny, vzhÄūadom na rozsah ÄlÃĄnku.
V prÃpade vÅĄetkÃ―ch rovÃn bolo maximÃĄlne natoÄenie v hodnote 0,5° a maximÃĄlna vzdialenosÅĨ rovÃn 49,7 mm. MaximÃĄlna odchÃ―lka bodov mraÄna od roviny bola 65 mm, priÄom tieto maximÃĄ sa vyskytujÚ v oblasti elektrickÃ―ch zÃĄsuviek. V prÃpade rovinnosti sÚ odchÃ―lky v intervale od −35 mm do 35 mm, priÄom tieto maximÃĄ sa nachÃĄdzajÚ v oblasti dverÃ, elektrickÃ―ch zÃĄsuviek a pod.
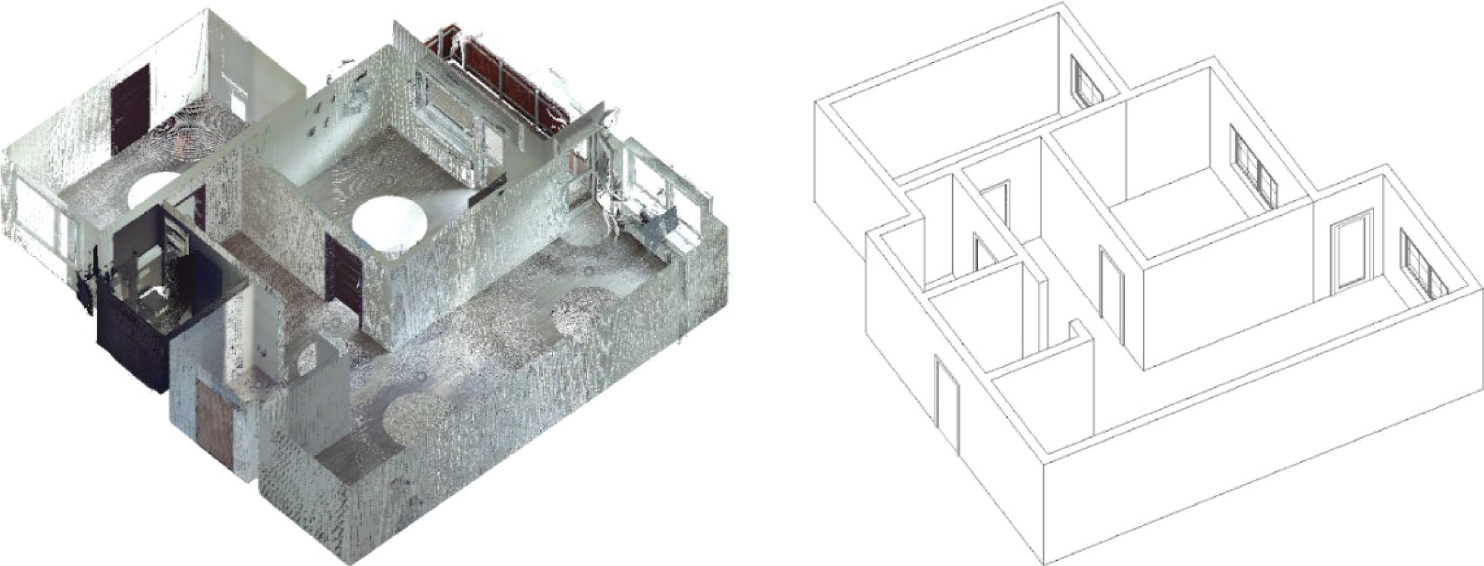
Obr. 7 MraÄno bodov (vÄūavo) a generalizovanÃ― BIM model (vpravo) prÃpadovej ÅĄtÚdie
| Ä. r. | aIFC | aPoC | bIFC | bPoC | cIFC | cPoC | dIFC [m] | dPoC [m] |
|---|---|---|---|---|---|---|---|---|
| 1 | 0,842 | −0,841 | −0,540 | 0,541 | 0,000 | 0,002 | 1,497 | −1,501 |
| Ä. r. | roll [°] | Δ [mm] | max_dev [mm] | min_dev [mm] | avg_dev [mm] | abs_max [mm] |
|---|---|---|---|---|---|---|
| 1 | 0,1 | −4 | 34 | −16 | −1 | 34 |
| Ä. r. | max_dev [mm] | min_dev [mm] | avg_dev [mm] | abs_max [mm] |
|---|---|---|---|---|
| 1 | 14 | −30 | 0 | 30 |
4. ZÃĄver
CieÄūom predkladanÃĐho prÃspevku bolo predstaviÅĨ aplikÃĄciu na automatizovanÚ kontrolu vyhotovenia stavebnÃ―ch objektov, priÄom vstupmi sÚ BIM model, ktorÃ― mÃĄme vo formÃĄte IFC a mraÄno bodov uÅū existujÚceho stavebnÃĐho objektu. Pomocou navrhnutej aplikÃĄcie mÃīÅūe pouÅūÃvateÄū jednoducho vykonaÅĨ geometrickÃĐ overenie rovÃn stien, priÄom v prÃspevku je v krÃĄtkosti ukÃĄzanÃ― aj experiment aplikÃĄcie.
PoÄakovanie
PrÃĄca sÚvisà s aktivitami vyvÃjanÃ―mi v rÃĄmci rieÅĄenia projektu APVV-18-0247 „AutomatizÃĄcia kontroly elektronickej dokumentÃĄcie stavieb s vyuÅūitÃm inovatÃvnych technolÃģgià zberu Údajov a virtuÃĄlnych modelov“.
PouÅūitÃĐ zdroje
- ISO 16739-1:2018 — “Industry Foundation Classes (IFC) for data sharing in the construction and facility management industries — Part 1: Data schema” [Internet]. 2018 [cited 2020 Oct 28]. Available from:
https://www.iso.org/standard/70303.html - Honti R., ErdÃĐlyi J., KopÃĄÄik A. Plane segmentation from point clouds. Pollack Period [Internet]. 2018 Aug 1 [cited 2020 Oct 29]; 13(2):159–71. Available from: https://akjournals.com/view/journals/606/13/2/article-p159.xml
- Fischler MA, Bolles RC. Random sample consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun ACM. 1981 Jun 1; 24(6):381–95.
- Honti R., Bratislava. SegmentÃĄcia rovÃn. GeodetickÃ― a kartografickÃ― obzor. 2019; 89–94.
The paper briefly deals with building information modelling and creation of digital twins of buildings using modern techniques of spatial data collection (TLS). It describes an algorithm for automated verification of the building's structures. It presents algorithms for automated difference model creation between the BIM model and data obtained from TLS or photogrammetry. The results are used to verify the geometric parameters of structural elements (such as flatness of walls, straightness of pipes etc.), as well as to determine deviations in their location (position and orientation from the project itself). The information obtained is a basis for the qualification and quantification of deviations during construction management.