ProblĂ©my u mÄĆenĂ teplot pasivnĂmi Äidly
PasivnĂ odporovĂĄ Äidla teploty jsou u zaĆĂzenĂ TZB prvnĂ volbou. Proti ÄidlĆŻm aktivnĂm s napÄĆ„ovĂœm nebo proudovĂœm vĂœstupem nebo ÄidlĆŻm s digitĂĄlnĂm vĂœstupem (sbÄrnicĂ) jsou relativnÄ levnĂĄ a snadno se instalujĂ, protoĆŸe u nich nezĂĄleĆŸĂ na polaritÄ vedenĂ. NasazenĂ pasivnĂch Äidel vĆĄak mĆŻĆŸe pĆinĂĄĆĄet nÄkterĂ© problĂ©my, jimĆŸ – a jejichĆŸ odstraĆovĂĄnĂ – se budeme vÄnovat v nĂĄsledujĂcĂm textu.
Typy Äidel a jejich vlastnosti
V systĂ©mech vÄtrĂĄnĂ, vytĂĄpÄnĂ a klimatizace se Äasem ustĂĄlilo nÄkolik zĂĄkladnĂch typĆŻ pasivnĂch Äidel:
NTC (s negativnĂm teplotnĂm koeficientem, tedy u nich se zvyĆĄujĂcĂ se teplotou odpor klesĂĄ) s nejrĆŻznÄjĆĄĂmi charakteristikami: 1,8 kΩ, 10 kΩ, 20 kΩ, pĆĂpadnÄ jinĂœ speciĂĄlnĂ rozsah. S tÄmito Äidly se setkĂĄme nejÄastÄji u splitovĂœch klimajednotek, vyznaÄujĂ se ĆĄirokou zmÄnou odporu, napĆ. u Äidla NTC 10 kΩ je to 100 kΩ aĆŸ 800 Ω v bÄĆŸnÄ se vyskytujĂcĂm rozsahu teplot −20 aĆŸ 100 °C. Tato vlastnost ovĆĄem znamenĂĄ, ĆŸe vstupnĂ rozsah mÄĆenĂ odporu v regulĂĄtoru musĂ bĂœt dosti velkĂœ.
Pt100 – tento mÄĆicĂ prvek najdeme hlavnÄ u kalorimetrĆŻ v podobÄ spĂĄrovanĂœch dvojic Äidel s pevnou dĂ©lkou kabelu, coĆŸ zaruÄuje vysokou pĆesnost a nemoĆŸnost ovlivĆovat mÄĆenĂ. Pro bÄĆŸnĂ© instalace ale Pt100 pĆĂliĆĄ vhodnĂĄ volba nenĂ, a to pro nĂzkĂœ zĂĄkladnĂ odpor Äidla, protoĆŸe mÄĆenĂ je pak vĂœznamnÄ ovlivĆovĂĄno parazitnĂm odporem kabelu. Proto se u systĂ©mu DDC nejÄastÄji pouĆŸĂvajĂ Äidla
Pt1000 se zĂĄkladnĂm odporem 1000 Ω pĆi 0 °C, Äasto pouĆŸĂvanĂœ standard,
Ni1000-5000 (tĂ©ĆŸ Ni1000 TK5000, Ni1000 L&G, Ni1000 Landis, Ni1000 Siemens) s teplotnĂm koeficientem 5000 ppm/K a
Ni1000-6180 (nÄkdy zvanĂĄ Ni1000 Sauter) s teplotnĂm koeficientem 6180 ppm/K.
Oba poslednÄ zmĂnÄnĂ© typy nejsou vzĂĄjemnÄ zcela kompatibilnĂ, pohledem do tabulky zĂĄvislosti odporu na teplotÄ zjistĂme, ĆŸe jiĆŸ u pokojovĂœch teplot je rozdĂl mÄĆenĂ asi 4 K, u teplot horkĂ© vody 10 K i vĂce. Proto pozor na zĂĄmÄnu pĆi nĂĄhradĂĄch starĆĄĂch systĂ©mĆŻ: pĆi uvĂĄdÄnĂ do provozu se mĆŻĆŸe zdĂĄt, ĆŸe hodnota je v poĆĂĄdku, protoĆŸe pĆi zkouĆĄenĂ vstupĆŻ a vĂœstupĆŻ nemusĂme na prvnĂ pohled rozdĂl odhalit, „nÄjakou“ teplotu to mÄĆĂ.
Princip mÄĆenĂ
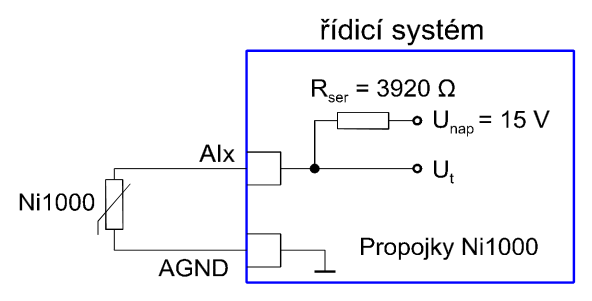
Obr. 1: PĆĂklad ĆeĆĄenĂ vstupnĂch obvodĆŻ
PĆi mÄĆenĂ odporu se Äidlo v principu napĂĄjĂ zdrojem konstantnĂho proudu a mÄĆĂ se Ășbytek napÄtĂ na Äidle. ZjednoduĆĄenĂ© schĂ©ma ĆeĆĄenĂ vstupnĂch obvodĆŻ (napĆ. podle aplikaÄnĂ poznĂĄmky firmy Amit) je na Obr. 1, kde se vyuĆŸĂvĂĄ odporovĂœ dÄliÄ: na promÄnnĂ©m odporu – Äidle – je mÄĆen Ășbytek napÄtĂ. ÄĂm vÄtĆĄĂ by byl odpor Rser, tĂm vĂce bychom se pĆibliĆŸovali zapojenĂ se zdrojem konstantnĂho proudu. V praxi jsou obvody doplĆovĂĄny filtry, ochranami proti pĆepÄtĂ atd.
NapÄtĂ Ut je pĆivedeno do A/D pĆevodnĂku, z nÄj je poÄĂtĂĄn odpor a vĂœsledek je linearizovĂĄn podle pĆevodnĂ tabulky odpor / teplota pro pĆĂsluĆĄnĂœ typ Äidla. JiĆŸ zde si vĆĄimnÄme, ĆŸe regulĂĄtor mÄĆĂ souÄasnÄ s odporem Äidla i odpor pĆĂvodnĂch vodiÄĆŻ, tedy kabelu, jĂmĆŸ je Äidlo pĆipojeno k regulĂĄtoru, a to vÄetnÄ parazitnĂch odporĆŻ vĆĄech svorek, konektorĆŻ atd. Z toho plyne prvnĂ pravidlo pro pĆipojovĂĄnĂ pasivnĂch Äidel:
Kabel od Äidla vedeme pĆĂmo na svorky regulĂĄtoru, pokud moĆŸno bez nastavovĂĄnĂ kabelu, mezisvorek v rozvadÄÄi, spoleÄnĂœch zemĂ pro vĂce Äidel atd. Kabel musĂ mĂt dostateÄnĂœ prĆŻĆez, doporuÄuje se 2×0,8 mm2, nenĂ tedy dobrĂ© pouĆŸĂvat UTP kabely. U vedenĂ delĆĄĂch neĆŸ 20 aĆŸ 30 m pro jistotu spoÄĂtĂĄme parazitnĂ odpor kabelu (dbejme na to, ĆŸe vodiÄ vede k Äidlu i od nÄj, tedy jmenovitĂœ odpor ĆŸĂly na jednotku dĂ©lky * dĂ©lka kabelu * 2) a pokud odpor hraje vĂœznamnÄjĆĄĂ roli – u Pt1000 je chyba u pokojovĂœch teplot asi 1 K pro kaĆŸdĂ© 4 ohmy –, upozornĂme na to v projektu, aby programĂĄtor mohl zavĂ©st softwarovou korekci – nebo zvĂĄĆŸĂme pouĆŸitĂ aktivnĂho Äidla.
TrvalĂœ mÄĆicĂ proud Äidlem by mohl vĂ©st k jeho nadmÄrnĂ©mu ohĆĂvĂĄnĂ. Proto se pouĆŸĂvĂĄ pulsnĂ mÄĆenĂ: do Äidla je mÄĆicĂ proud multiplexovĂĄn a pĆivĂĄdÄn jen napĆ. po 1/8 Äasu, coĆŸ souvisĂ s poÄtem analogovĂœch vstupĆŻ na jeden A/D pĆevodnĂk v regulĂĄtoru, nebo dokonce jeĆĄtÄ kratĆĄĂ dobu. Proto pozor pĆi zkuĆĄebnĂm mÄĆenĂ voltmetrem, kterĂœ zobrazuje pouze stĆednĂ hodnotu. IdeĂĄlnĂ je pro tyto pĆĂpady osciloskop, jak jeĆĄtÄ uvidĂme dĂĄle.
Chyby mÄĆenĂ – galvanickĂ© problĂ©my
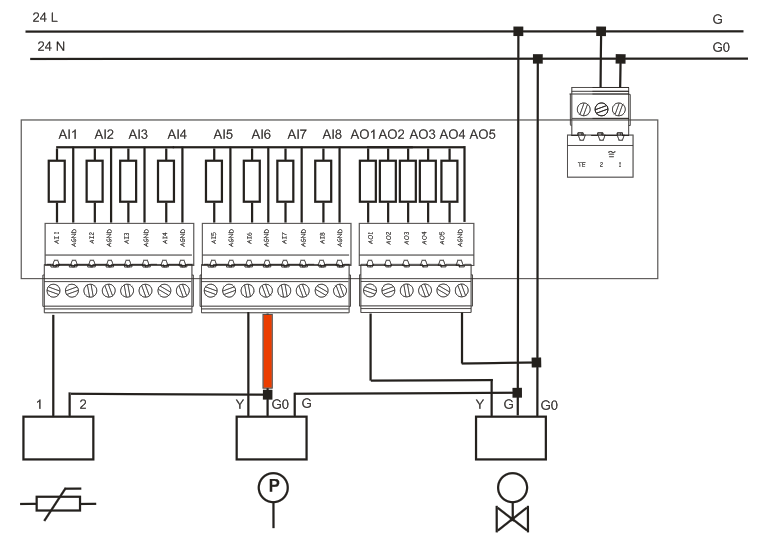
Obr. 2: ChybnĂ© zapojenĂ pasivnĂho Äidla
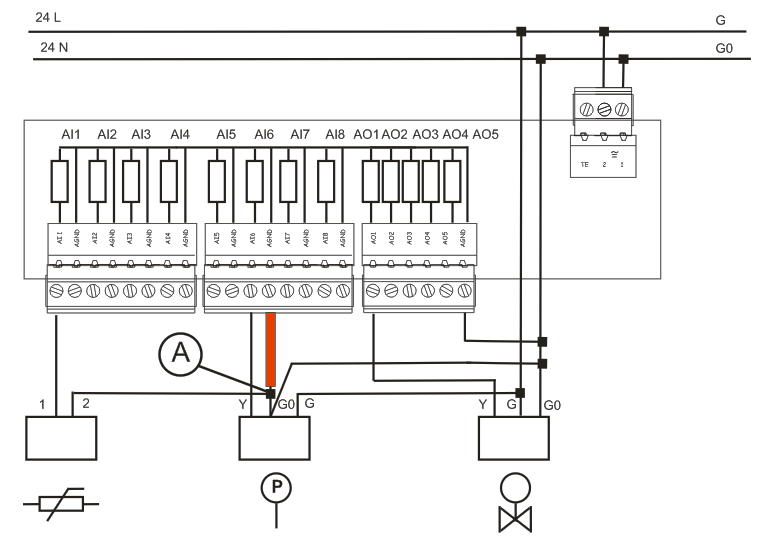
Obr. 3: DalĆĄĂ chybnĂ© zapojenĂ pasivnĂho Äidla
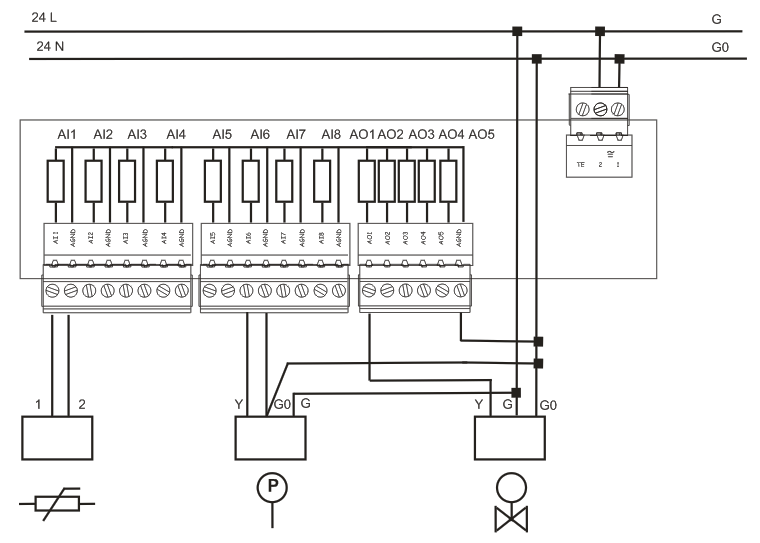
Obr. 4: SprĂĄvnĂ© zapojenĂ pasivnĂho Äidla
S tÄmito problĂ©my se setkĂĄvĂĄme asi nejÄastÄji. Jejich pĆĂÄiny bĂœvajĂ jednak v nekvalitnĂch projektech, jednak v odbytĂ© realizaci. GalvanickĂ© ovlivĆovĂĄnĂ mÄĆenĂ© hodnoty Äidel nastĂĄvĂĄ tehdy, kdyĆŸ do vstupnĂch obvodĆŻ mÄĆenĂ teploty protĂ©kĂĄ vodivou vazbou neĆŸĂĄdoucĂ proud z jinĂœch okruhĆŻ. Tento proud buÄ pĆĂmo prochĂĄzĂ vstupem regulĂĄtoru do spoleÄnĂ© zemÄ, nebo vytvĂĄĆĂ na vedenĂ od Äidla k regulĂĄtoru Ășbytek napÄtĂ, kterĂœ mÄĆenou hodnotu zkresluje. Typicky k nÄmu dochĂĄzĂ pĆi spoleÄnĂ© zemi pasivnĂch Äidel a Äidel aktivnĂch (tlak vody, relativnĂ vlhkost atd.).
Na prvnĂm obrĂĄzku (Obr. 2) je zcela chybnĂ© zapojenĂ, kdy ÄervenÄ oznaÄenou ÄĂĄstĂ (a pak spoleÄnou zemĂ AI a AO do G0) teÄe napĂĄjecĂ proud Äidla tlaku. Jak Äidlo tlaku, tak pĆedevĆĄĂm Äidlo teploty je ovlivnÄno Ășbytkem napÄtĂ, vznikajĂcĂm na ÄervenĂ©m Ășseku. V praxi to znamenĂĄ, ĆŸe Äidlo silnÄ pĆemÄĆuje, obvykle mÄĆenĂĄ hodnota pĆekroÄĂ hornĂ hranici rozsahu, takĆŸe Äidlo teploty (nebo vĆĄechna Äidla na spoleÄnĂ©m pĆevodnĂku) hlĂĄsĂ 149 °C nebo podobnÄ nesmyslnou hodnotu. To mĂĄ samozĆejmÄ vliv na regulaÄnĂ algoritmy, systĂ©m pak vypadĂĄvĂĄ na zdĂĄnlivĂ© pĆehĆĂĄtĂ TUV, pĆetopenĂ vĂœmÄnĂku atd.
PĆi snaze o vylepĆĄenĂ podle Obr. 3 je tedy Äidlo tlaku vedeno ÄtyĆvodiÄovÄ, napĂĄjenĂ je ĆeĆĄeno samostatnĂœm pĂĄrem G–G0. Äidlo teploty je ovĆĄem „chyceno“ na spoleÄnou tzv. signĂĄlovou zem u vstupnĂch svorek v rozvadÄÄi (na obrĂĄzku bod A) – a problĂ©m tedy v menĆĄĂ mĂĆe trvĂĄ: Ășbytek napÄtĂ zpĆŻsobenĂœ proudem z aktivnĂho Äidla do vstupu se opÄt pĆiÄĂtĂĄ k napÄtĂ, kterĂ© potĆebujeme mÄĆit s pĆesnostĂ na mV (v zapojenĂ vstupu podle Obr. 1 odpovĂdĂĄ cca 12 mV jednomu kelvinu).
Teprve zapojenĂ podle Obr. 4 by tyto problĂ©my mÄlo ĆeĆĄit.
VĆĄimnÄme si ale, ĆŸe na obr. 4 doĆĄlo k vytvoĆenĂ smyÄky mezi zemĂ analogovĂœch vĂœstupĆŻ, G0, zemĂ aktivnĂho Äidla, zemĂ analogovĂœch vstupĆŻ a jejĂm propojenĂm se zemĂ AO uvnitĆ modulu. Zde mĆŻĆŸe dochĂĄzet k indukovĂĄnĂ stĆĂdavĂ© sloĆŸky a opÄt ovlivĆovĂĄnĂ mÄĆenĂ© hodnoty. Pomohlo by jednak oddÄlenĂ zemÄ pro vstupy a vĂœstupy uvnitĆ modulu (coĆŸ ovĆĄem zĂĄvisĂ na konstrukci modulu a nic s tĂm nenadÄlĂĄme), nebo alespoĆ vedenĂ vodiÄĆŻ tak, aby plocha uzavĂranĂ© smyÄky byla co nejmenĆĄĂ. Mohou nĂĄm zde pomoci kabely s kroucenĂœmi pĂĄry, kterĂ© plochu smyÄek zcela eliminujĂ.
VĂœĆĄe uvedenĂœ problĂ©m mĆŻĆŸe mĂt nÄkdy aĆŸ bizarnĂ dĆŻsledky:
Na jistĂ© akci bylo zpĆŻsobem uvedenĂœm na Obr. 3 zapojeno Äidlo teploty a regulaÄnĂ ventil – pro aktivnĂ vĂœstupnĂ periferie (ventily, klapky) platĂ stejnĂĄ pravidla jako pro aktivnĂ Äidla. PĆi nĂzkĂ© teplotÄ vody v okruhu regulĂĄtor zvĂœĆĄil napÄtĂ na ventilu, aby dotopil, coĆŸ mÄlo za nĂĄsledek skok teploty smÄrem vzhĆŻru. Na to regulĂĄtor reagoval pĆivĆenĂm ventilu, ruĆĄivĂœ signĂĄl se zmenĆĄil a teplota zdĂĄnlivÄ poklesla. Stav se zanedlouho ustĂĄlil a okruh reguloval naprosto stabilnÄ, bohuĆŸel ovĆĄem na pĆĂliĆĄ nĂzkou „teplotu“.
ZemnÄnĂ
PotĂĆŸĂ spojenĂœch s uzemĆovĂĄnĂm je celĂĄ Ćada a jejich odstraĆovĂĄnĂ nenĂ snadnĂ©. PĆedevĆĄĂm se snaĆŸĂme zĂskat projekt, resp. schĂ©ma skuteÄnĂ©ho zapojenĂ. UvÄdomme si, ĆŸe spoleÄnĂ© potenciĂĄly (G0, TE, N, PEN) jsou kresleny topologicky, tedy projekt obvykle neĆeĆĄĂ, odkud a kam jsou vodiÄe taĆŸeny, ale jen jejich vzĂĄjemnĂ© vodivĂ© propojenĂ, kterĂ© pĆedpoklĂĄdĂĄ nulovĂœ odpor vodiÄĆŻ.
V praxi do mÄĆenĂ vstupuje odpor vedenĂ, a to i uvnitĆ rozvadÄÄe. Je tedy nutnĂ© pouĆŸĂvat spoleÄnĂ© svorkovnice pro vĆĄechny spoleÄnĂ© potenciĂĄly, jako PE, N, G a G0, a propoje mezi periferiemi, vstupy a vĂœstupy regulĂĄtorĆŻ a dalĆĄĂmi souÄĂĄstmi vĂ©st vĆŸdy na tyto svorkovnice a pokud moĆŸno co nejkratĆĄĂ cestou. DobrĂĄ montĂĄĆŸnĂ praxe zde pomĆŻĆŸe zejmĂ©na u druhĂ© skupiny problĂ©mĆŻ, kterĂ© majĂ spoleÄnĂœ jmenovatel: ruĆĄenĂ zpĆŻsobenĂ© stĆĂdavĂœm proudem.
Chyby mÄĆenĂ – indukovanĂ© ruĆĄenĂ
IndukovanĂ© ruĆĄenĂ je zĂĄkeĆnĂ© v tom, ĆŸe se ĆĄĂĆĂ bezdrĂĄtovÄ. IndukovanĂ© napÄtĂ mĆŻĆŸe pochĂĄzet z nejrĆŻznÄjĆĄĂch zdrojĆŻ. Obvykle to jsou frekvenÄnĂ mÄniÄe, fotovoltaickĂ© stĆĂdaÄe, spĂnanĂ© zdroje nebo cizĂ systĂ©my, jako motory, prĆŻmyslovĂ© pĆĂstroje Äi jinĂ© spotĆebiÄe.
ZĂĄklad pro ochranu proti indukovanĂ©mu ruĆĄenĂ je v kvalitnĂm provedenĂ instalace. KritickĂ© body jsou:
- soubÄhy vedenĂ mimo rozvadÄÄ: aÄkoli doporuÄenĂ udĂĄvajĂ samostatnĂ© trasy pro silnoproud a sdÄlovacĂ vedenĂ s odstupem alespoĆ 20 cm nebo kanĂĄly oddÄlenĂ© vodivou pĆepĂĄĆŸkou, v praxi se zvlĂĄĆĄtÄ u stĆeĆĄnĂch venkovnĂch VZT jednotek pouĆŸĂvajĂ spoleÄnĂ© trasy. Zde je problĂ©m o to horĆĄĂ, ĆŸe vedenĂ jsou pomÄrnÄ dlouhĂĄ,
- soubÄhy vedenĂ v rozvadÄÄi: snaĆŸme se silovĂĄ vedenĂ a sdÄlovacĂ vedenĂ vĂ©st po opaÄnĂœch bocĂch skĆĂnÄ, oddÄlovat silovĂ© prvky (stykaÄe, frekvenÄnĂ mÄniÄe) a vstupnĂ mÄĆicĂ moduly, a pokud moĆŸno udrĆŸovat vedenĂ co nejkratĆĄĂ (vhodnĂœm umisĆ„ovĂĄnĂm pĆĂstrojĆŻ na desku rozvadÄÄe),
- tvoĆenĂ smyÄek, jejichĆŸ plochou se mĆŻĆŸe na vodiÄ indukovat ruĆĄivĂœ signĂĄl – viz poznĂĄmka k Obr. 4 vĂœĆĄe,
- instalace filtrĆŻ k pĆĂstrojĆŻm, kterĂ© by je mÄly mĂt a nemajĂ: to je spojeno s vĂcenĂĄklady, coĆŸ investor nese s nelibostĂ nebo zamĂtne zcela („problĂ©m je v mÄĆenĂ a regulaci, ne v technologii“)
- a stĂnÄnĂ, kterĂ©mu vÄnujeme samostatnĂœ odstavec.
StĂnÄnĂ

Obr. 5: V hornĂ ÄĂĄsti u mĂsta pro vstup kabelĆŻ do rozvadÄÄe pĆipravenĂĄ svorkovnice TE (vpravo od svorek)
ĆĂkĂĄ se, ĆŸe ĆĄpatnĂ© stĂnÄnĂ je horĆĄĂ neĆŸ ĆŸĂĄdnĂ©. NekvalitnÄ uzemnÄnĂ© stĂnÄnĂ pĆŻsobĂ v podstatÄ jako pĆijĂmacĂ antĂ©na. StĂnicĂ vodiÄe a pĂĄsky proto spojujeme do jednoho spoleÄnĂ©ho bodu a ten spojĂme dostateÄnÄ silnĂœm vodiÄem s technickou zemĂ (TE) nebo potenciĂĄlem PEN, doporuÄuje se co nejblĂĆŸe ke vstupu do rozvadÄÄe – viz Obr. 5. PouĆŸĂvĂĄme samostatnĂ© ĆĄroubovĂ© svorky, zkroucenĂ do spoleÄnĂ©ho svazku nestaÄĂ. StĂnÄnĂ by mÄlo bĂœt spojeno se zemĂ jen na jednom konci (v rozvadÄÄi), aby nedochĂĄzelo ke vzniku smyÄek. DruhĂœ konec se doporuÄuje buÄ nechat nezapojenĂœ, nebo spojit se zemĂ kapacitnĂ vazbou (keramickĂœm kondenzĂĄtorem o kapacitÄ ĆĂĄdovÄ stovek nF). OsvÄdÄilo se konec spĂĆĄe nezapojovat.
VstupnĂ obvody regulĂĄtorĆŻ majĂ obvykle filtry pro frekvence 50 nebo 60 Hz, kterĂ© majĂ eliminovat ruĆĄenĂ sĂĆ„ovĂœm brumem. Proti ruĆĄenĂ z frekvenÄnĂch mÄniÄĆŻ, spĂnanĂœch zdrojĆŻ a FV stĆĂdaÄĆŻ vĆĄak jiĆŸ tyto filtry nepomĂĄhajĂ, tyto pĆĂstroje produkujĂ ruĆĄenĂ o frekvencĂch desĂtek aĆŸ stovek kHz. JeĆĄtÄ horĆĄĂ zprĂĄva je, ĆŸe vyĆĄĆĄĂ frekvence se ĆĄĂĆĂ daleko lĂ©pe, neĆŸ ruĆĄenĂ sĂĆ„ovĂ©.
Pro diagnostiku je zde vhodnĂœ spektrĂĄlnĂ analyzĂĄtor nebo osciloskop s moĆŸnostĂ zobrazenĂ spektra signĂĄlu, kterĂœm zjistĂme u ruĆĄivĂœch signĂĄlĆŻ i charakteristiky (frekvenci, tvar, pĆĂtomnost v Äase). PĆi zkoumĂĄnĂ pouze tvaru signĂĄlu osciloskopem vidĂme superpozici vĆĄech ruĆĄenĂœch i ruĆĄĂcĂch signĂĄlĆŻ a je dost sloĆŸitĂ© vyÄĂst, jakou frekvenci ruĆĄenĂ mĂĄ. Je to problĂ©m hlavnÄ v poslednĂch letech, kdy tvar napĂĄjecĂho napÄtĂ se od ideĂĄlnĂ sinusovky stĂĄle vĂce vzdaluje a ve spektru se tak zaÄĂnajĂ objevovat vyĆĄĆĄĂ harmonickĂ© zĂĄkladnĂ frekvence. Podle vĂœsledkĆŻ mÄĆenĂ mĆŻĆŸeme lĂ©pe usoudit na pĆĂÄinu problĂ©mĆŻ. Postupujeme asi takto:
- odpojĂme z regulĂĄtoru nebo I/O modulu vĆĄechny ostatnĂ typy signĂĄlĆŻ (analogovĂ© vĂœstupy (AO), digitĂĄlnĂ vĂœstupy (DO), digitĂĄlnĂ vstupy (DI)), nechĂĄme jen pasivnĂ Äidla
- odpojĂme vĆĄechna Äidla aĆŸ na jedinĂ©, zkontrolujeme sprĂĄvnost mÄĆenĂ
- postupnÄ pĆipojujeme dalĆĄĂ pasivnĂ Äidla a kontrolujeme sprĂĄvnost mÄĆenĂ
- po jednom pĆipojujeme aktivnĂ Äidla
- po jednĂ© pĆipojujeme analogovĂ© vĂœstupnĂ periferie (ventily, klapky).
Jakmile mÄĆenĂ© teploty „uletĂ“, sledujeme charakter ruĆĄivĂ©ho signĂĄlu (stejnosmÄrnĂœ offset / 50 Hz / jinĂœ kmitoÄet), provÄĆĂme sprĂĄvnost zapojenĂ prĂĄvÄ pĆipojovanĂ© periferie a zkusĂme pĆijĂt na to, proÄ prĂĄvÄ ona (v kombinaci s jiĆŸ zapojenĂœmi Äidly Äi vĂœstupy!) mÄĆenĂ zkresluje. Obvykle pĆijdeme na spoleÄnĂ© zemÄ, soubÄhy, pomĂĄhĂĄ i zkusit oddÄlit napĂĄjenĂ (pĆidat samostatnĂœ zdroj 24 V). Je proto uĆŸiteÄnĂ© mĂt s sebou samostatnĂœ zdroj, i kdyby to mÄl bĂœt obyÄejnĂœ sĂĆ„ovĂœ adaptĂ©r na 12 nebo 24 V.
PĆi mÄĆenĂ osciloskopem pozor na to, ĆŸe zem sondy bĂœvĂĄ galvanicky spojena s ochrannĂœm vodiÄem napĂĄjenĂ. Abychom si mohli sondu pĆipojit na „naĆĄi“ zem v rozvadÄÄi, je nutnĂ© pro napĂĄjenĂ osciloskopu pouĆŸĂvat UPS, kterou pĆi mÄĆenĂ odpojĂme od sĂtÄ, nebo pouĆŸĂt osciloskop s izolovanĂœmi kanĂĄly.
Velmi zĂĄleĆŸĂ na provedenĂ vstupnĂch a vĂœstupnĂch modulĆŻ, zvlĂĄĆĄtÄ u kombinovanĂœch modulĆŻ (tedy obsahujĂcĂch jak analogovĂ© vstupy (AI), tak AO). NÄkolik pĆĂkladĆŻ:
Saia PCD2/3.W525: AI a AO majĂ v modulu spoleÄnou zem, napĂĄjenĂ i sbÄrnice jsou galvanicky oddÄleny, modul obsahuje filtr 50/60 Hz)
Honeywell CLIOP 830: zem AI i AO galvanicky spojenĂĄ s G0, pouĆŸĂvajĂ se Äidla NTC 20 kΩ
Siemens PXC36-S: AI majĂ oddÄlenou zem (svorka M), AO majĂ spoleÄnou zem s napĂĄjenĂm G0, oddÄlenĂĄ komunikace
Domat MCIO2: AI majĂ vlastnĂ zem AIGND, AO majĂ vlastnĂ zem AOGND, napĂĄjenĂ i sbÄrnice jsou od ostatnĂch ÄĂĄstĂ modulu i navzĂĄjem galvanicky oddÄleny.
U modulĆŻ s lepĆĄĂm oddÄlenĂm ovĆĄem zase nesmĂme zapomĂnat na propojenĂ zemĂ s napĂĄjenĂm u tĆĂvodiÄovĂœch aktivnĂch Äidel a analogovĂœch vĂœstupnĂch periferiĂ, aby analogovĂœ signĂĄl byl vztaĆŸen k spoleÄnĂ© napĂĄjecĂ i signĂĄlovĂ© zemi Äidla Äi ventilu nebo klapky G0.
DalĆĄĂ ĆeĆĄenĂ
NÄkdy pomĂĄhĂĄ propojit zem napĂĄjenĂ 24 V st (G0) se stĂnicĂ zemĂ (Technical Earth, TE), kterĂĄ vychĂĄzĂ z ochrannĂ©ho vodiÄe (PE nebo PEN). To ale nenĂ galvanicky sprĂĄvnĂ© ĆeĆĄenĂ, protoĆŸe soustava 24 V st by mÄla bĂœt od zemÄ oddÄlena.
SoftwarovĂ© korekce mĆŻĆŸeme akceptovat pouze jako kompenzaci parazitnĂho odporu kabelu. Setkal jsem se i se snahou zavĂ©st korekci dynamickou – bylo to v pĆĂpadÄ, kdy pĆi zmÄnÄ otĂĄÄek motoru ĆĂzenĂm FM chyba teploty vzrĆŻstala v zĂĄvislosti na zvyĆĄujĂcĂch se otĂĄÄkĂĄch. ProgramĂĄtor mÄl v Ășmyslu mÄnit softwarovou korekci pĆĂmo v programu podle poĆŸadavku na ĆĂdicĂ signĂĄl pro FM; toto zcela jistÄ nenĂ sprĂĄvnĂœ postup, neodstraĆuje pĆĂÄinu a lze ho pouĆŸĂt snad jen jako doÄasnĂ© opatĆenĂ, neĆŸ se ruĆĄenĂ odstranĂ zmÄnou zapojenĂ, instalacĂ filtrĆŻ atd. (BohuĆŸel, nejtrvanlivÄjĆĄĂ bĂœvĂĄ dobĆe udÄlanĂ© provizorium, a proto se podobnĂœm „ĆeĆĄenĂm“ radÄji zcela vyhnÄme.)
PĆi pĆetrvĂĄvajĂcĂch problĂ©mech se osvÄdÄilo pro kritickĂ© periferie (frekvenÄnĂ mÄniÄe) pouĆŸĂt buÄ samostatnĂœ I/O modul analogovĂœch vĂœstupĆŻ, kde vĂœstup je galvanicky zcela oddÄlen od jakĂœchkoli dalĆĄĂch signĂĄlĆŻ, nebo – a to je asi ideĂĄlnĂ ĆeĆĄenĂ – pro ĆĂzenĂ FM pouĆŸĂt galvanicky oddÄlenou komunikaÄnĂ linku, kterĂĄ jednak uĆĄetĆĂ vstupy a vĂœstupy v ĆĂdicĂm systĂ©mu, jednak umoĆŸnĂ zaintegrovat celou Ćadu signĂĄlĆŻ vÄetnÄ diskrĂ©tnĂch a kumulovanĂœch hodnot, jako jsou chybovĂ© kĂłdy, provoznĂ hodiny atd.
RecenzovanĂœ text shrnuje problĂ©my, kterĂ© se v praxi vyskytujĂ v systĂ©mech domovnĂ automatizace a mÄĆenĂ a regulace pĆi pouĆŸitĂ pasivnĂch odporovĂœch Äidel. Autor uvĂĄdĂ nÄkolik zĂĄkladnĂch, pĆesto pomÄrnÄ Äasto se vyskytujĂcĂch chyb a problĂ©mĆŻ pĆi nĂĄvrhu pĆipojenĂ teplotnĂch senzorĆŻ. Jsou to zejmĂ©na problĂ©my spojenĂ© se ĆĄpatnÄ navrĆŸenĂœm pĆipojenĂm odporovĂœch Äidel teploty, jejich zemnÄnĂm nebo stĂnÄnĂm. RovnÄĆŸ jsou uvedeny nÄkterĂ© zpĆŻsoby potlaÄenĂ ruĆĄivĂœch vlivĆŻ, kterĂ© pĆŻsobĂ na senzory s analogovĂœm vĂœstupem. Dle mĂ©ho nĂĄzoru by bylo uĆŸiteÄnĂ© v ÄlĂĄnku zmĂnit a srovnat i vĂœhody a nevĂœhody pouĆŸitĂ teplotnĂch Äidel se standardnĂm napÄĆ„ovĂœm (0-10V) nebo proudovĂœm vĂœstupem (4-20mA) a digitĂĄlnĂch senzorĆŻ s pĆipojenĂm na jednu ze standardnĂch bÄĆŸnÄ pouĆŸĂvanĂœch komunikaÄnĂch sbÄrnic. ÄlĂĄnek lze brĂĄt jako struÄnĂœ, praktickĂœ nĂĄvod, jak potlaÄit nebo eliminovat problĂ©my pĆi mÄĆenĂ teplot v systĂ©mech mÄĆenĂ a regulace. I kdyĆŸ jsou problĂ©my se sprĂĄvnĂœm pĆipojenĂm senzorĆŻ, zemnÄnĂm a stĂnÄnĂm nĂĄplnĂ vĂœuky odbornĂœch stĆednĂch prĆŻmyslovĂœch i vysokĂœch elektrotechnickĂœch ĆĄkol, v praxi se na nÄ velmi Äasto zapomĂnĂĄ, coĆŸ mĆŻĆŸe mĂt zĂĄsadnĂ vliv na funkÄnost celĂ©ho systĂ©mu mÄĆenĂ a regulace.
Passive temperature sensors are the first choice in building control systems. They are cheap and easy to install thanks to their polarity independence, compared to active sensors with voltage or current output. However, deployment of passive sensor may lead to problems, which – and debugging of which – are dealt in the following article.