ZpracovÃĄnà dat RPAS a jejich vyuÅūitelnost ve stavebnictvÃ
PÅedklÃĄdanÃ― text pojednÃĄvÃĄ o vyuÅūità RPAS (Remotely Piloted Aerial System) z hlediska stavebnictvà a pamÃĄtkovÃĐ pÃĐÄe na pÅÃkladech jednotlivÃ―ch pÅÃpadovÃ―ch studiÃ. Pro ÚÄely stavebnictvà a monitorovÃĄnà technologickÃ―ch areÃĄlÅŊ jsou vyuÅūÃvÃĄny zejmÃĐna multirotorovÃĐ systÃĐmy, kterÃĐ majà sice sloÅūitÄjÅĄÃ ovlÃĄdÃĄnÃ, ale je moÅūno je s ÚspÄchem navÃĄdÄt ve velmi nÃzkÃĐ vÃ―ÅĄce a malÃĐ rychlosti okolo a nad objektem. ZÃĄsadnà pro jejich vyuÅūità je ale bezpeÄnÃĄ manipulace a zajiÅĄtÄnà prostoru po dohodÄ s vlastnÃkem Äi sprÃĄvcem objektu.
Ãvod
ÄlÃĄnek navazuje volnÄ na zÃĄkladnà informace o RPAS z ÄlÃĄnku „Drony vÅĄude nad nÃĄmi“ (Pavelka, 2016). V souÄasnÃĐ dobÄ existuje pro tzv. „drony“ nÄkolik uÅūÃvanÃ―ch zkratek. StarÅĄÃ UAV (unmanned aerial vehicle, tj. vlastnà leteckÃ― prostÅedek) Äi UAS (unmanned aerial system, tj. vlastnà leteckÃ― prostÅedek vÄetnÄ dalÅĄÃch zaÅÃzenà jako ÅÃdÃcÃho segmentu, plÃĄnovÃĄnà trasy apod.) se pomÄrnÄ vÅūily, novÄjÅĄÃ a pÅesnÄjÅĄÃ vÃ―raz RPAS (remotly piloted aircraft system) je sice sloÅūitÄjÅĄÃ, ale lÃĐpe vystihuje vlastnà zaÅÃzenÃ, tj. jednÃĄ se o dÃĄlkovÄ pilotovanÃ― prostÅedek, za jehoÅū provoz existuje zodpovÄdnÃĄ osoba.
VyuÅūità RPAS („dronÅŊ“)
VyuÅūità RPAS je zÃĄvislÃĐ na jeho typu, charakteru snÃmanÃĐho objektu Äi plochy a prÃĄvnÃch pÅedpisech. OkÅÃdlenÃĐ systÃĐmy jsou vhodnÄjÅĄÃ pro kolmÃĐ snÃmkovÃĄnà Äi tvorbu videa, hodà se na vÄtÅĄÃ oblasti a jejich uplatnÄnà je zejmÃĐna pÅi mapovacÃch technologiÃch a monitorovÃĄnà vÄtÅĄÃch oblastÃ. MultirotorovÃĐ systÃĐmy mohou pomalu oblÃĐtat objekty, „viset“ ve vzduchu nad urÄitÃ―m bodem a vzhledem k letovÃĐ vÃ―drÅūi se hodà na menÅĄÃ oblasti a stavebnà objekty. Legislativa platà pro oba typy stejnÃĄ. LevnÃĐ typy RPAS jsou nejÄastÄji vyuÅūÃvÃĄny pro tvorbu videa nad danÃ―m ÚzemÃm.
ProgramovÃĄnà letu a zpracovÃĄnà dat
VÃ―znamnou souÄÃĄstà celÃĐho procesu vyuÅūità RPAS je samozÅejmÄ zpracovatelskÃ― a ÅÃdÃcà software. Toho je dnes mnoho druhÅŊ, logicky rÅŊznÃĐ kvality, ceny, vÃ―konnosti a pÅesnosti vÃ―sledkÅŊ. Zde je nutno dÄlit software na ovlÃĄdÃĄnà RPAS a provedenà samotnÃĐho snÃmkovÃĐho letu a software pro zpracovÃĄnà obrazovÃ―ch dat.
Pro plÃĄnovÃĄnà letu je vhodnÃĐ vyuÅūÃt firemnà software, dodÃĄvanÃ― s profesionÃĄlnÃm systÃĐmem, kupÅ. eMotion od SenseFly k RPAS EBee. Ten vynikÃĄ jednoduchÃ―m pouÅūitÃm a skuteÄnÄ profesionÃĄlnÃm pÅÃstupem k mapovacÃm pracÃm s RPAS. PlÃĄnuje snÃmkovÃ― let a asistuje pÅi jeho provedenÃ; na externÃm notebooku ukazuje vÅĄechny nutnÃĐ informace i meteorologickÃĐ parametry bÄhem letu. Existujà samozÅejmÄ ale i jinÃĐ ÅÃdÃcà programovÃĐ produkty, napÅ. Pixhawk autopilot, PX4 Flight Stack Äi APM Flight Stack.
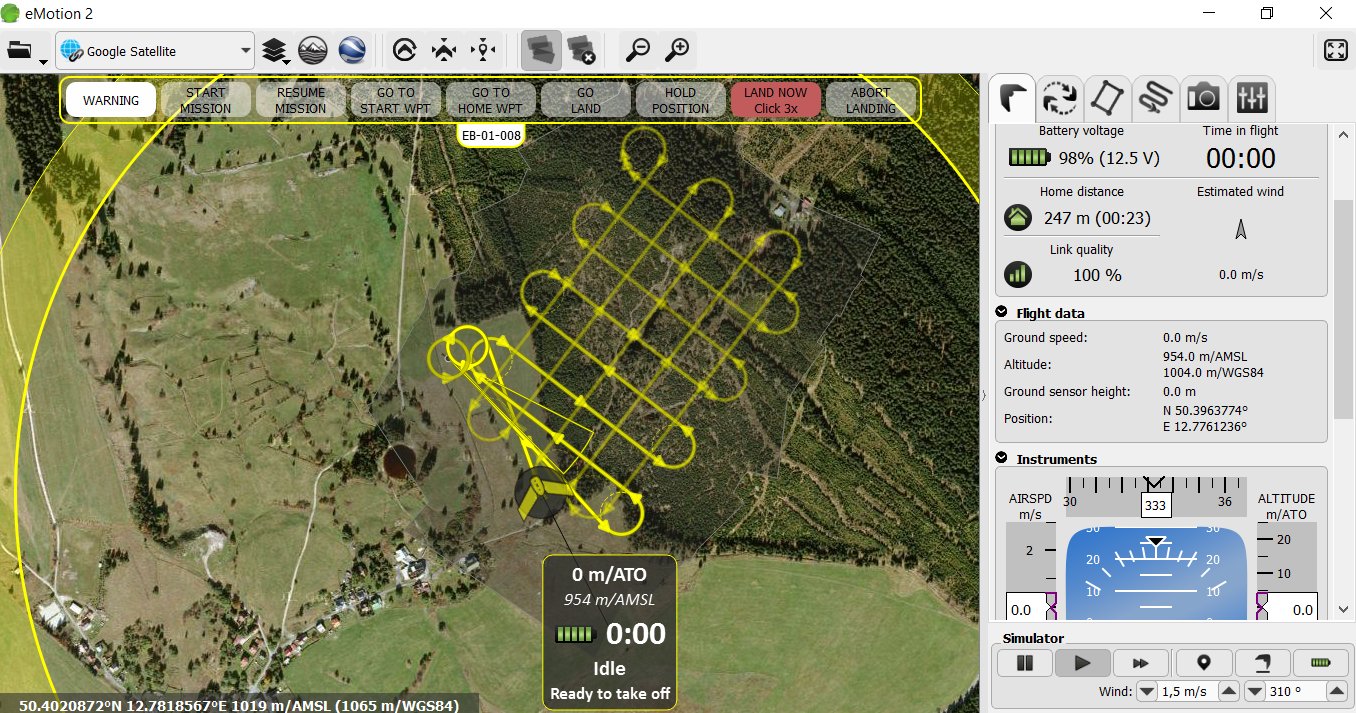
Obr. 1: LetovÃ― panel software eMotion (SenseFly) ukazuje vÅĄechny parametry letu, trajektorii, stav bateriÃ, smÄr vÄtru, kvalitu pÅenosovÃĐho signÃĄlu na podkladÄ druÅūicovÃĐho nebo leteckÃĐho ortofota.
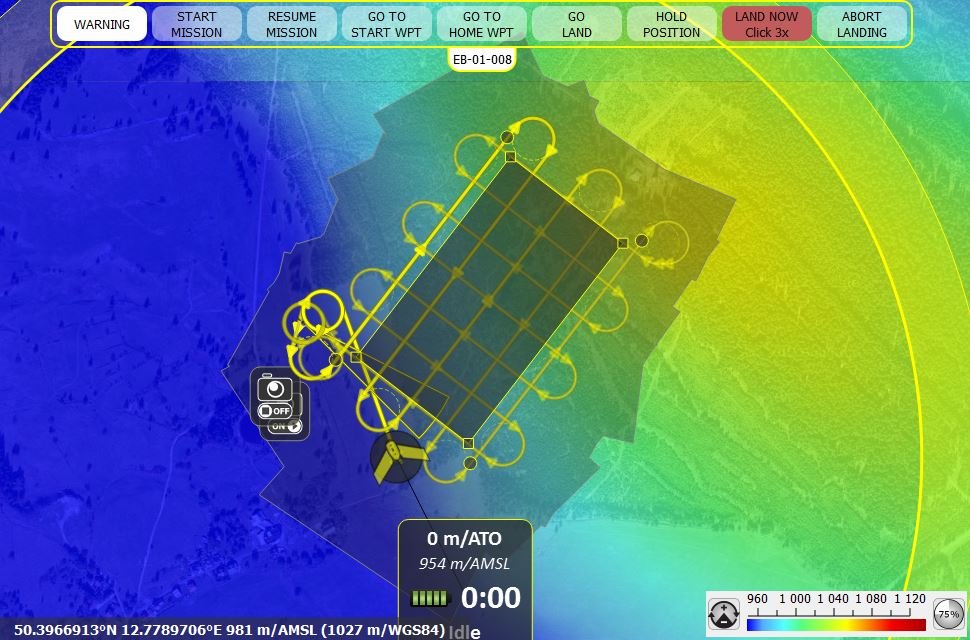
Obr. 2: LetovÃ― panel software eMotion (SenseFly) pouÅūÃvÃĄ takÃĐ volnÃ― digitÃĄlnà model terÃĐnu, pokud je k dispozici.
Pro zpracovÃĄnà dat existuje skuteÄnÄ dnes jiÅū velkÃ― vÃ―bÄr software. NaÅĄe zkuÅĄenosti jsou pouze s vybranÃ―m softwarem, obecnÄ a nejÄastÄji je dnes vyuÅūÃvÃĄn software AgiSoft PhotoScan (ten je urÄen obecnÄ pro tvorbu prostorovÃ―ch modelÅŊ ze souboru fotografià technologià IBMR – Image Based Modelling and Rendering na zÃĄkladÄ obrazovÃĐ korelace). Z profesionÃĄlnÃho software lze jmenovat Pix4D, 3DF Zephyr, Ikaros, Aerogis, Dronemapper aj., kterÃĐ lze doporuÄit z fotogrammetrickÃĐho hlediska, existuje i volnÃ― (free) software v podobÄ software Insight 3D Äi kupÅ. Bundler. PorovnÃĄnà software se zabÃ―vala a stÃĄle zabÃ―vÃĄ Åada autorÅŊ (ÅehÃĄk, 2012).
ZkuÅĄenosti laboratoÅe fotogrammetrie, FSv ÄVUT v Praze

Obr. 3: EBee od firmy SenseFly
RPAS s nÃĄzvem EBee od firmy SenseFly je klasickÃĐ letadlo s odnÃmatelnÃ―mi kÅÃdly a tlaÄnou vrtulÃ. UmoÅūÅuje automatickÃ― snÃmkovÃ― let s dobou letu aÅū 40 minut. K dispozici jsou rÅŊznÃĐ kamery pro viditelnÃĐ a blÃzkÃĐ infraÄervenÃĐ zÃĄÅenÃ, vyrÃĄbÄna je multispektrÃĄlnà a termÃĄlnà kamery (pÅed letem je nutno vybrat ovÅĄem jen jednu vzhledem k nosnosti prostÅedku). VyuÅūità je ÅĄirokÃĐ – od klasickÃĐho mapovÃĄnÃ, tvorby ortofota s vysokÃ―m rozliÅĄenÃm (velikost pixelu aÅū 3 cm), tvorby velmi pÅesnÃĐho digitÃĄlnÃho modelu povrchu aÅū po monitorovÃĄnà stavu vegetace (napÅ. pomocà vegetaÄnÃho indexu NDVI). ObecnÄ lze ale ÅÃci, Åūe se jednÃĄ o mapovacà a monitorovacà systÃĐm pro ploÅĄnÃ― sbÄr dat, kterÃ― mÅŊÅūe s ÚspÄchem konkurovat leteckÃĐ Äi druÅūicovÃĐ fotogrammetrii v malÃ―ch ÚzemÃch (nutno poznamenat, Åūe geometrickÃĐ rozliÅĄenà druÅūicovÃ―ch dat je dnes jiÅū v extrÃĐmnÃm pÅÃpadÄ 31 cm (!), bÄÅūnÄ 50 cm a u leteckÃ―ch dat je bÄÅūnÃĄ velikost pixelu 10–25 cm).

Obr. 4: Hexakopter
RPAS Hexakopter je produkt nÄmeckÃĐ firmy Mikrokopter. Å eÅĄtivrtulovÃĄ verze je schopna nÃĐst i klasickou digitÃĄlnà zrcadlovku, typickÃ― let je kolem 15–20 minut podle vybavenÃ. Do zavÄÅĄenÃĐ otoÄnÃĐ pÅÃstrojovÃĐ ploÅĄiny lze umÃstit digitÃĄlnà kameru, poÅizovat ÅĄikmÃĐ i svislÃĐ snÃmky, poÅizovat video. VyuÅūÃt lze ale i multispektrÃĄlnà komoru (R,G,B,NIR – Tetracam) Äi miniaturnà termokameru (napÅ. Optris ThermoImager TIM) a dalÅĄÃ. MultikoptÃĐry jsou vhodnÃĐ pro menÅĄÃ ploÅĄnÃĐ oblasti, napÅ. archeologickÃĐ vykopÃĄvky menÅĄÃho rozsahu, stavebnà objekty, revize objektÅŊ, pamÃĄtkovÃĄ pÃĐÄe, monitorovÃĄnà elektrickÃĐho vedenÃ, pÅehrad, vÄÅūà aj. (pozor, tÃĐmÄÅ vÅĄe je ale v rozporu s DoplÅkem X pro vyuÅūità RPAS v ÄR). NicmÃĐnÄ, tyto moÅūnosti vyuÅūità jsou standardnÄ nabÃzeny a ukazovÃĄny na vÅĄech svÄtovÃ―ch odbornÃ―ch akcÃch.
NÃĄsledujÃcà pÅÃkladovÃĐ studie jsou z oblasti stavebnictvÃ, pamÃĄtkovÃĐ pÃĐÄe, dokumentace a monitorovÃĄnà staveb. Popisujà vyuÅūità multikoptÃĐr na starÅĄÃch projektech; v souÄasnosti je jejich vyuÅūità pro tyto prÃĄce v nÄkterÃ―ch pÅÃpadech problematickÃĐ z dÅŊvodu platnosti pÅedpisÅŊ pro vyuÅūità RPAS v ÄR (od 1. 3. 2012 platà DoplnÄk X), pokud se jednÃĄ o veÅejnÃ― prostor.
PrÅŊzkum a dokumentace stavebnÃho objektu
Tento typ projektÅŊ Äi pracà je typickÃ― pro multirotorovÃĐ systÃĐmy. Startovat lze z velmi malÃĐ oblasti, let mÅŊÅūe bÃ―t pomalÃ― a svislÃ―, coÅū je ideÃĄlnà pÅedpoklad pro monitorovÃĄnà stavu stavebnÃch a technologickÃ―ch objektÅŊ. Jak ale vyplÃ―vÃĄ z „DoplÅku X“, ploÅĄnÄ mapovat Äi monitorovat hustÄ zastavÄnÃĄ Územà nelze. PÅesto je pÅi zajiÅĄtÄnà relativnÄ malÃĐho okolà letovÃĐ oblasti let bezpeÄnÃ― a monitorovacà prÃĄce jsou ekonomickÃĐ a rychlÃĐ. Je tedy alespoÅ nutno zajistit blÃzkÃĐ okolà a dohodnout se na podmÃnkÃĄch se sprÃĄvcem Äi vlastnÃkem objektu.
Jako pÅÃklad lze uvÃĐst monitorovÃĄnÃ ÅĄpatnÄ pÅÃstupnÃ―ch ÄÃĄstà historickÃĐho objektu. PÅi dokumentaci stavu fasÃĄdy byla provedeno fotogrammetrickÃĐ zamÄÅenà jednotlivÃ―ch fasÃĄd, kterÃĐ pÅedpoklÃĄdÃĄ urÄitÃ― odstup od objetu pro vhodnÃĐ snÃmkovÃĄnÃ. V pÅÃpadÄ, Åūe fasÃĄda je tÄsnÄ pÅimknuta k jinÃĐ stavbÄ, v okolà je mnoÅūstvà vzrostlÃĐ vegetace Äi vrchnà ÄÃĄst je (napÅ. z dÅŊvody pÅeÄnÃvajÃcà ÅÃmsy) neviditelnÃĄ, je vyuÅūità RPAS pÅÃnosnÃĐ. Stavba leÅĄenà a Äi pÅÃjezd ploÅĄiny jsou buÄ pÅÃliÅĄ drahÃĐ a pomalÃĐ nebo i technicky neproveditelnÃĐ.

Obr. 5: Hexakopter pÅi monitorovÃĄnà nepÅÃstupnÃĐ ÄÃĄsti fasÃĄdy, zÃĄmek LitomyÅĄl, foto K. Pavelka, 2011.

Obr. 6 : UkÃĄzka snÃmku z dokumentaÄnÃho letu; snÃmkovÃĄnà zdola ÅĄpatnÄ viditelnÃ―ch oblastà bylo provedeno v nÄkolika minutÃĄch, nebylo potÅeba leÅĄenà a pÅÃjezd ploÅĄiny do parkovÃĐ ÄÃĄsti areÃĄlu. ZÃĄmek LitomyÅĄl, foto K. Pavelka, M. ÅehÃĄk, 2011.
Äastou Úlohou je tvorba videa pro ÚÄely PR, reklamy Äi jednoduchou vizuÃĄlnà kontrolu vrchnà ÄÃĄsti budovy.

Obr. 7: UCEEB, ÄVUT v Praze, snÃmky, poÅÃzenÃĐ za ÚÄelem PR do dokonÄenà objektu; hexakopter, foto a video B. MichalÃk a K. Pavelka, 2014.
MapovÃĄnà sklÃĄdek
SklÃĄdky jsou rÅŊznÃĐ povahy, nÄkterÃĐ jevà vÃ―znamnou termÃĄlnà aktivitu dÃky typu materiÃĄlu a procesÅŊm uvnitÅ sklÃĄdky, jinÃĐ jsou termÃĄlnÄ neaktivnÃ, ale mohou ohrozit Åūivotnà prostÅedÃ. SledovÃĄnà kubatury, charakteru sklÃĄdky, vlivu na okolnà objekty a Územà jsou klasickÃĐ Ãškoly prÃĄvÄ pro RPAS – jednÃĄ se o relativnÄ malÃĐ lokality, Äasto ÅĄpatnÄ pÅÃstupnÃĐ Äi nebezpeÄnÃĐ. NÄkolikaminutovÃ― let nad takovÃ―mto objektem zajistà velmi jednoduÅĄe kontrolu ÚzemÃ.
Na nÃĄsledujÃcÃch obrÃĄzcÃch je ukÃĄzka jednoduchÃĐ dokumentace sklÃĄdky pomocà kamery s nÃzkÃ―m grafickÃ―m rozliÅĄenÃm (bÄÅūnÃĐ video). Video bylo upraveno do jednotlivÃ―ch snÃmkÅŊ s intervalem jednÃĐ vteÅiny, oblast sklÃĄdky byla zpracovÃĄna pomocà software AgiSoft PhotoScan do podoby texturovanÃĐho modelu a ortofota. V detailu je ale vidÄt, Åūe kvalita vÃ―stupu z videa nenà dostateÄnÃĄ pro profesionÃĄlnà vyuÅūitÃ. DalÅĄÃ obrazovÃĐ vÃ―stupy sklÃĄdky u Å―aclÃĐÅe byly poÅÃzeny profesionÃĄlnÃm systÃĐmem, kterÃ― garantuje vÃ―raznÄ lepÅĄÃ vÃ―sledky zejmÃĐna dÃky kvalitnà kameÅe.

Obr. 8: SklÃĄdka modelovanÃĄ pomocà snÃmkÅŊ z videokamery (H. StrakovÃĄ, K. Pavelka, 2013)

Obr. 9: Ortofoto sklÃĄdky z snÃmkÅŊ, odvozenÃ―ch z videa (H. StrakovÃĄ, K. Pavelka, 2013)

Obr. 10: Detail hornÃho pravÃĐho rohu pÅedeÅĄlÃĐho obrÃĄzku jasnÄ ukazuje chyby v ortofotu (zvlnÄnà budov, ÅĄikmÃ― komÃn aj.), kterÃĐ jsou zpÅŊsobeny nekvalitnÃmi snÃmky (bÄÅūnÃĐ video) a z nich odvozenÃ―m nepÅesnÃ―m digitÃĄlnÃm modelem povrchu (H. StrakovÃĄ, K. Pavelka, 2013)
MonitorovÃĄnà termÃĄlnà aktivity
MonitorovÃĄnà termÃĄlnà aktivity objektÅŊ Äi areÃĄlÅŊ patÅà jiÅū delÅĄÃ dobu k bÄÅūnÃ―m technologiÃm. TermÃĄlnà kamery ale majà pomÄrnÄ malÃĐ rozliÅĄenà a byly v nedÃĄvnÃĐ dobÄ znaÄnÄ hmotnÃĐ a velmi drahÃĐ. Poslednà lÃĐta pÅinesla vÃ―raznÃĐ snÃÅūenà cen tepelnÃ―ch detektorÅŊ, kterÃĐ vedly ke snÃÅūenà ceny, zmenÅĄily se tÃĐÅū kompletnà kamery, kterÃĐ dnes mohou bÃ―t velikosti krabiÄky od zÃĄpalek. I kdyÅū jsou cenovÄ dostupnÄjÅĄÃ, stÃĄle stojà pÅes sto tisÃc KÄ; bÄÅūnÄ ale pracujà jako klasickÃĐ video-kamery. PoÅizujà tedy videozÃĄbÄr, kterÃ― je nutno dÃĄle zpracovat. Pokud se poÅūaduje jen pÅehlÃdky a monitorovanÃĐho objektu Äi dokumentaÄnà obrÃĄzky, nenà obyÄejnÄ se zpracovÃĄnÃm problÃĐm. Pokud mÃĄ bÃ―t ale vÃ―sledkem kupÅ. termÃĄlnà tematickÃĄ mapa, zpracovÃĄnà nenà jednoduchÃĐ. VideozÃĄbÄry je nutno zpracovat do souboru snÃmkÅŊ, kterÃĐ se ve fotogrammetrickÃĐm programu dajà zpracovat do formy ortofota. BohuÅūel, vÄtÅĄina programovÃ―ch produktÅŊ, pracujÃcÃch na bÃĄzi obrazovÃĐ korelace, potÅebuje pro kvalitnà zpracovÃĄnà znaÄnÃ― pÅekryt snÃmkÅŊ a vysokÃĐ rozliÅĄenÃ, coÅū u termÃĄlnÃch snÃmkÅŊ nenà bÄÅūnÃĐ. DÃĄle nastÃĄvÃĄ problÃĐm s georeferencovÃĄnÃm dat; vlÃcovacà body se ÅĄpatnÄ vytvÃĄÅà jako umÄlÃĐ cÃle, vyhledÃĄnà pÅirozenÃ―ch vlÃcovacÃch bodÅŊ nenà jednoduchÃĐ kvÅŊli nÃzkÃĐmu rozliÅĄenà a odliÅĄnÃĐmu pohledu. Pokud RPAS nenà vybaven RTK GNSS systÃĐmem a moÅūnostà pÅihrÃĄvÃĄnà polohovÃ―ch a orientaÄnÃch dat k videodatÅŊm, je jistou moÅūnostà buÄ pÅidat do systÃĐmu menÅĄÃ RGB kameru, nebo provÃĐst dalÅĄÃ let s klasickÃ―m digitÃĄlnÃm fotoaparÃĄtem.

Obr. 11: Detailnà pohled na ÅĄikmo umÃstÄnou termÃĄlnà minikameru Optris TIM 160 (160×120 pixelÅŊ) a malou RGB kameru pro lokalizaci a videonÃĄhled trasy, oktokopter. Foto M. ÅehÃĄk, 2012.
V roce 2012 se podaÅilo pomocà kombinace RGB dat z rekognoskaÄnà kamery a termÃĄlnà kamery vytvoÅit i termÃĄlnà orotofoto tepelnÄ aktivnà sklÃĄdky v Å―aclÃĐÅi. Zde se ukÃĄzaly vÃ―hody bezkontaktnÃho monitorovÃĄnà nepÅÃstupnÃĐ Äi ÅĄpatnÄ pÅÃstupnÃĐ lokality. Jinou moÅūno stà je klasickÃĄ pÅehlÃdka tepelnÃ―ch ÚnikÅŊ staveb, kterÃĄ ale legislativnÄ narÃĄÅūà na nemoÅūnost lÃĐtat nad hustÄ zastavÄnou oblastÃ. DalÅĄÃ, v souÄasnÃĐ dobÄ velmi ÅūÃĄdanÃĄ aplikace, je monitorovÃĄnà sluneÄnÃch panelÅŊ a jejich celkÅŊ pomocà termÃĄlnà kamery (detekuje vadnÃĐ ÄÃĄsti panelÅŊ Äi celÃĐ vadnÃĐ panely), monitorovÃĄnà vÃ―robnÃch hal z hlediska ÚnikÅŊ tepla apod.
V souÄasnÃĐ dobÄ jsou dostupnÃĐ malÃĐ termoviznà kamery Optris s dvojnÃĄsobnÃ―m rozliÅĄenÃm a tÅetinovou cenou oproti roku 2010; ve verzi pro RPAS jsou vybaveny i miniaturnÃm poÄÃtaÄem. CelkovÃĄ vÃĄha systÃĐmu Äinà asi 450 g. V roce 2015 se podaÅilo poÅÃdit kvalitnà odlehÄenou termÃĄlnà kameru Thermoimager i pro okÅÃdlenÃ― systÃĐm EBee s rozliÅĄenÃm 640×512 v 12bitovÃĐ podobÄ dat. TechnickÃ― pokrok jde velmi rychle kupÅedu, otÃĄzkou je, kde na to vÅĄe shÃĄnÄt finance…
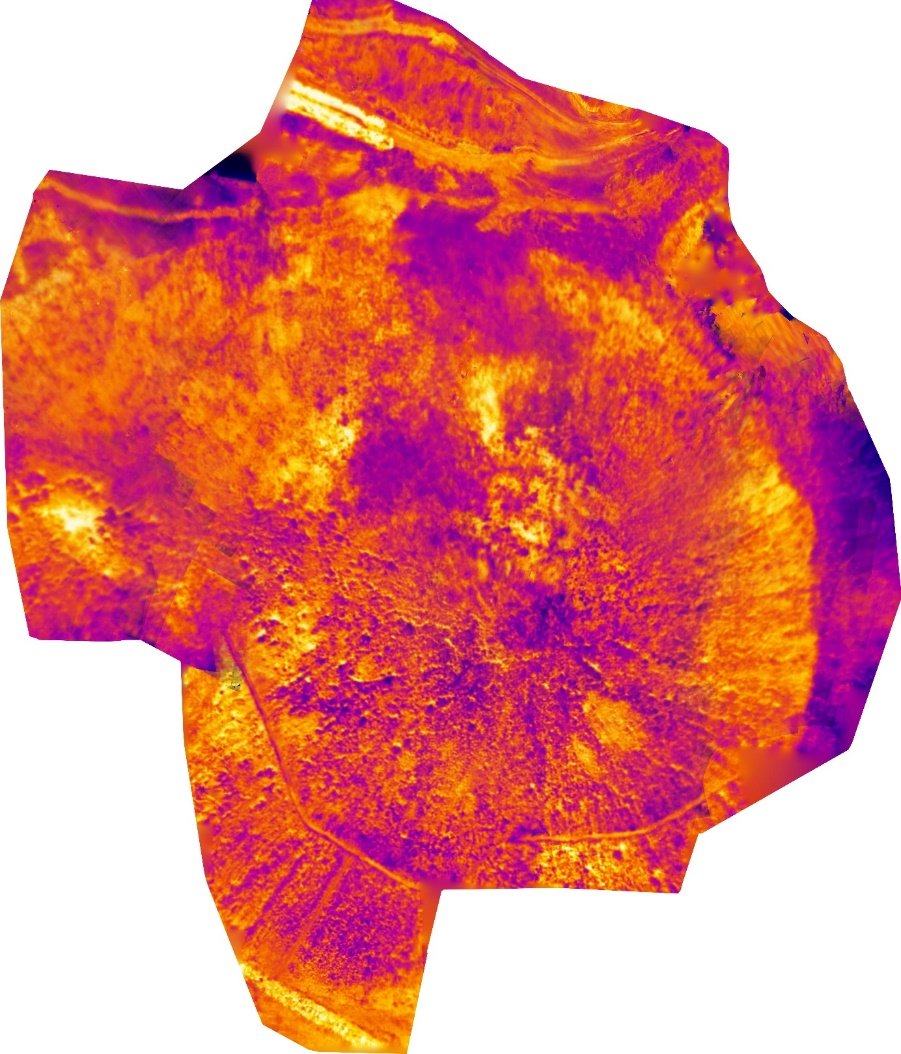
Obr. 12: VÃ―sledky monitorovÃĄnà termÃĄlnà aktivity sklÃĄdky Å―aclÃĐÅ. VÃ―sledkem bylo ortofoto, digitÃĄlnà model reliÃĐfu a prvnà zveÅejnÄnÃĐ termÃĄlnà ortofoto. M. ÅehÃĄk, H. StrakovÃĄ a K. Pavelka, 2012.
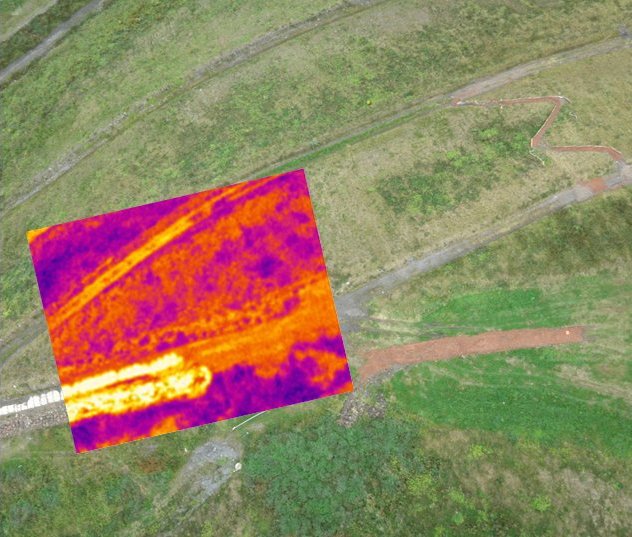
Obr. 13: SlouÄenà termÃĄlnÃch dat s klasickÃ―m snÃmkem, poÅÃzenÃ―m ve viditelnÃĐm oboru spektra (sklÃĄdka Å―aclÃĐÅ, M.ÅehÃĄk, 2012)
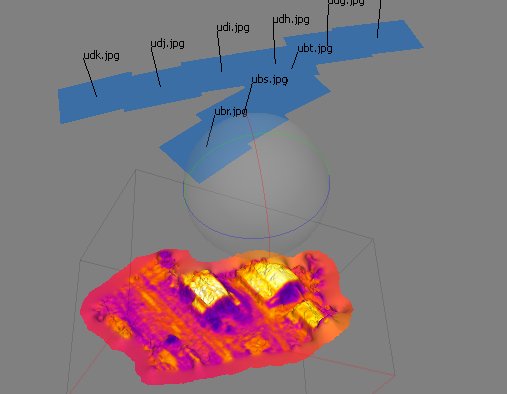
Obr. 14: UkÃĄzka 3D modelovÃĄnà stavebnÃch objektÅŊ z termoviznà kamery Optris TIM 160 s nÃzkÃ―m rozliÅĄenÃm (H. StrakovÃĄ, K. Pavelka, 2013)
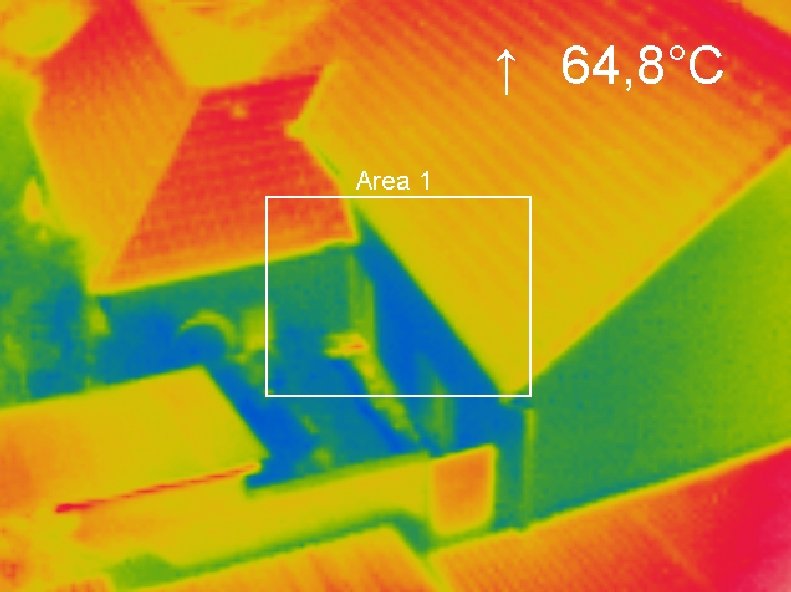
Obr. 15: TermÃĄlnà snÃmek, ukazujÃcà tepelnÃĐ Ãšniky ze staveb (hexakopter, Optris TIM 160), ÅehÃĄk, 2013

Obr. 16: SklÃĄdka Å―aclÃĐÅ. Ortofotomozaika, RPAS hexakopter, pouÅūita stÅednÄ kvalitnà kompaktnà kamera Canon. M. ÅehÃĄk, H. StrakovÃĄ a K. Pavelka, 2012.
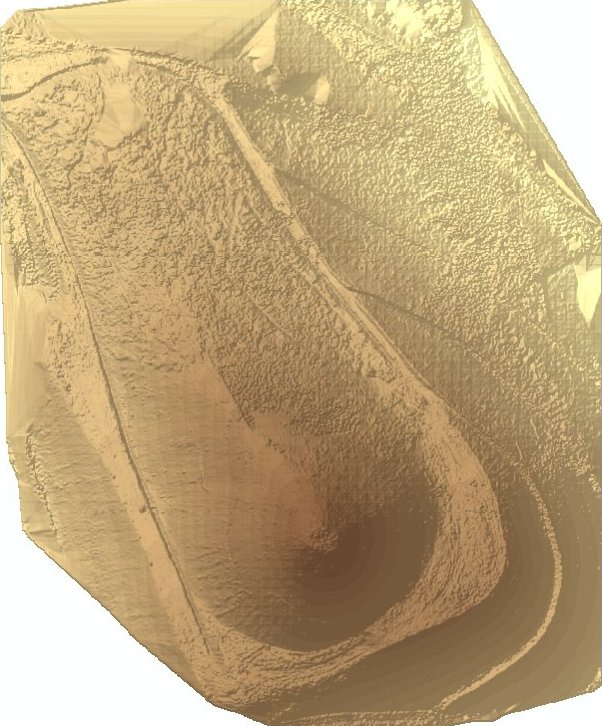
Obr. 17: SklÃĄdka Å―aclÃĐÅ. PÅesnÃ― digitÃĄlnà model povrchu. M.ÅehÃĄk, H.StrakovÃĄ a K.Pavelka, 2012.
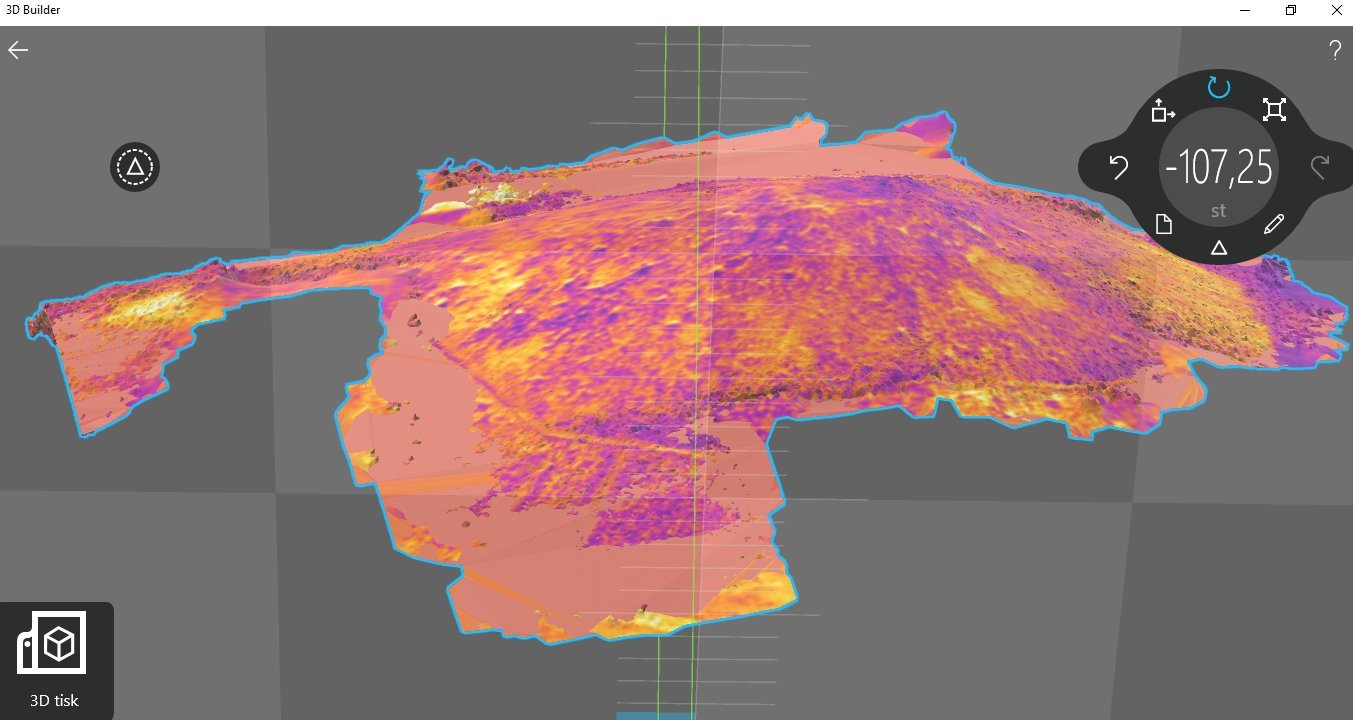
Obr. 18: DigitÃĄlnà prostorovÃ― model texturovanÃ― termÃĄlnÃm ortofotem, zobrazenÃ― v software 3D Builder, kterÃ― umoÅūÅuje prohlÃÅūenà prostorovÃĐho modelu a jeho vizualizaci a slouÅūà i pro moÅūnÃ― 3D tisk objektu (M. ÅehÃĄk, K. Pavelka, 2013)
Zde je vhodnÃĐ uvÃĐst odkaz na velmi uÅūiteÄnou pomÅŊcku – speciÃĄlnà program MAIA, kterÃ― v prostÅedà mobilÅŊ (Android), tabletÅŊ a dalÅĄÃch prostÅedkÅŊ podÃĄvÃĄ v kaÅūdÃĐm okamÅūiku pÅehled o vÅĄech omezenÃch, vyhlÃĄÅĄenÃ―ch ÅÃzenÃm leteckÃĐho provozu o aktivovanÃ―ch prostorech a dÃĄvÃĄ pÅehled o pohybu a pracÃch dalÅĄÃch RPAS v blÃzkÃĐm i vzdÃĄlenÃĐm okolà a podporuje tak bezpeÄnost pouÅūità RPAS v leteckÃĐm provozu ÄR; aplikace takÃĐ slouÅūà zÃĄroveÅ jako denÃk letÅŊ (funkÄnà od konce dubna 2016).
https://play.google.com/store/apps/details?id=cz.togle.droners&hl=cs
V dalÅĄÃm dÃle seriÃĄlu se budeme vÄnovat tÃĐmatu vyuÅūità RPAS pro mapovÃĄnà a monitoring. ZÃĄvÄr a literaturu najdete na konci tÅetÃho dÃlu.
VÃ―zkum a vÃ―sledky v tomto ÄlÃĄnku byly podpoÅeny grantem MKÄR DF13P01OVV002.
Text druhÃĐho ÄlÃĄnku vhodnÄ navazuje na prvnà dÃl a pojednÃĄvÃĄ o vyuÅūità RPAS ve stavebnictvà a pamÃĄtkovÃĐ pÃĐÄi a na praktickÃ―ch pÅÃkladech pÅedvÃĄdà zkuÅĄenosti pracovnÃkÅŊ a doktorandÅŊ Katedry geomatiky stavebnà fakulty ÄVUT. Tato skuteÄnost se projevuje i na popisu pÅÃpadovÃ―ch studiÃ, kterÃĐ jsou poplatnÃĐ RPAS prostÅedkÅŊm, kterÃĐ katedra vlastnà (ale asi je vhodnÄjÅĄÃ popisovat zkuÅĄenosti vlastnÃ, neÅū zkuÅĄenosti pÅevzatÃĐ). Naproti tomu jsou uvedeny vÅĄechny znÃĄme plÃĄnovacà a navigaÄnà softwary a softwary pro zpracovÃĄnà snÃmkÅŊ pro tvorbu digitÃĄlnÃch modelÅŊ povrchÅŊ a bezeÅĄvÃ―ch ortofotomap. Bylo by asi vhodnÃĐ, aby se autor vÃce zmÃnil o speciÃĄlnÃm programu MAIA, kterÃ― v androidnÃm prostÅedà mobilÅŊ, tabletÅŊ a dalÅĄÃch prostÅedkÅŊ podÃĄvÃĄ v kaÅūdÃĐm okamÅūiku pÅehled o vÅĄech omezenÃch vyhlÃĄÅĄenÃ―ch ÅÃzenÃm leteckÃĐho provozu o aktivovanÃ―ch prostorech a dÃĄvÃĄ pÅehled o pohybu a pracÃch dalÅĄÃch RPAS v blÃzkÃĐm i vzdÃĄlenÃĐm okolà a podporuje tak bezpeÄnost pouÅūità RPAS v leteckÃĐm provozu ÄR a zÃĄroveÅ slouÅūà jako denÃk letÅŊ. V textu jsou podrobnÄ zmÃnÄny i dalÅĄÃ senzory, kterÃĐ mohou potenciÃĄlnÄ poslouÅūit ve stavebnictvà a k ÅeÅĄenà ÚkolÅŊ pamÃĄtkovÃĐ pÃĐÄe. Ve vÅĄech pÅÃpadech autor upozorÅuje na nutnou bezpeÄnost provozu a v mnohÃĐm i na moÅūnÃĐ prohÅeÅĄky svÃ―ch studentÅŊ. NicmÃĐnÄ vÅĄechny jimi uskuteÄnÄnÃĐ lety pÅÃpadovÃ―ch studià byly uskuteÄnÄny na zÃĄkladÄ souhlasu vlastnÃka objetku a pozemkÅŊ. U jednotlivÃ―ch studiÃch uvÃĄdà autor nejen moÅūnosti a vÃ―hody, ale i nevÃ―hody nÄkterÃ―ch ÅeÅĄenà a chyby pÅi tvorbÄ vÃ―ÅĄe znÃnÄnÃ―ch produktÅŊ.
Presented text discusses the use of RPAS (Remotely Piloted Aerial System) in the building industry and heritage preservation. It provides information of various case studies and shows examples. For the purposes of building industry and technological area monitoring multicopter systems are mainly used. They have more complex control, but they can be successfully navigated in very low heights and low speeds around and above the object. Safe handling and ensuring the area after agreement with the owner or facility manager is crucial for their use.